針(zhen)對行星(xing)輪(lun)(lun)(lun)系(xi)(xi)(xi)動力(li)學(xue)建(jian)模與動態靜力(li)分析(xi)問題(ti),提出了(le)相應(ying)的(de)(de)向(xiang)量(liang)鍵(jian)合(he)(he)圖法。基于平(ping)面復和鉸的(de)(de)運動約束(shu)條(tiao)件,建(jian)立(li)了(le)更(geng)加簡(jian)明的(de)(de)平(ping)面復合(he)(he)鉸向(xiang)量(liang)鍵(jian)合(he)(he)圖模型。根據行星(xing)輪(lun)(lun)(lun)系(xi)(xi)(xi)構(gou)件間的(de)(de)運動約束(shu)關(guan)系(xi)(xi)(xi),將(jiang)系(xi)(xi)(xi)桿、行星(xing)輪(lun)(lun)(lun)、復合(he)(he)鉸及齒輪(lun)(lun)(lun)副的(de)(de)向(xiang)量(liang)鍵(jian)合(he)(he)圖模型組合(he)(he)起來,建(jian)立(li)了(le)雙(shuang)行星(xing)輪(lun)(lun)(lun)輪(lun)(lun)(lun)系(xi)(xi)(xi)機(ji)構(gou)的(de)(de)向(xiang)量(liang)鍵(jian)合(he)(he)圖模型。通(tong)過有效(xiao)的(de)(de)增廣方法,消除了(le)該類系(xi)(xi)(xi)統向(xiang)量(liang)鍵(jian)合(he)(he)圖中的(de)(de)微分因(yin)果(guo)關(guan)系(xi)(xi)(xi)。應(ying)用(yong)相應(ying)的(de)(de)算法,實現了(le)雙(shuang)行星(xing)輪(lun)(lun)(lun)輪(lun)(lun)(lun)系(xi)(xi)(xi)機(ji)構(gou)的(de)(de)計算機(ji)輔助(zhu)建(jian)模與動力(li)學(xue)分析(xi),說明了(le)所述方法的(de)(de)有效(xiao)性。
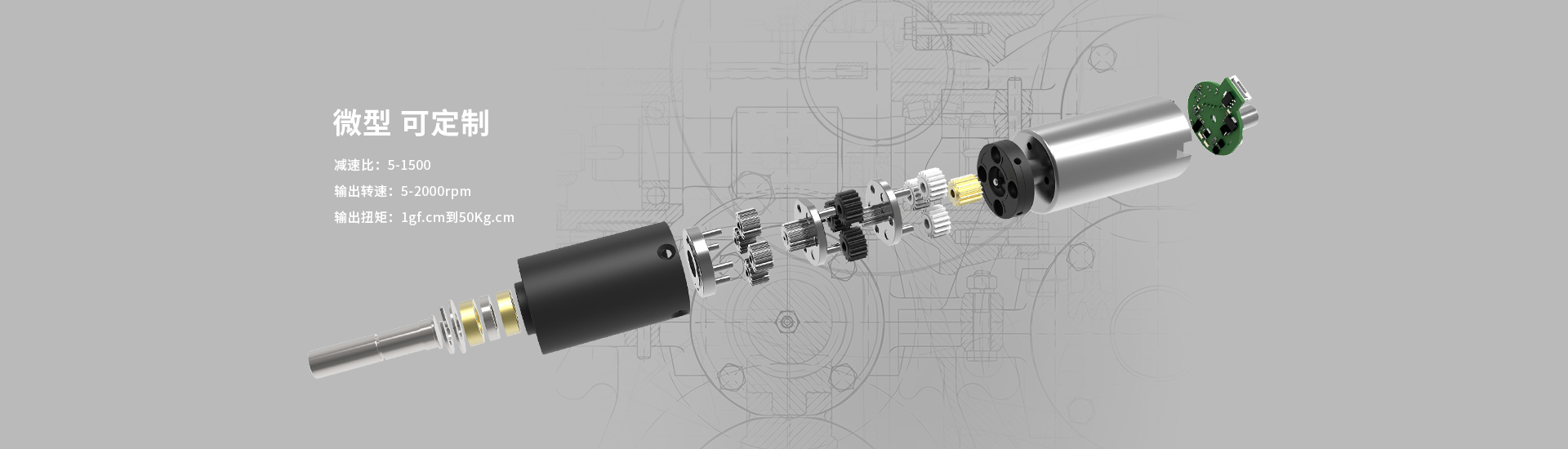
行(xing)星(xing)輪(lun)系機(ji)(ji)構(gou)可(ke)用較小空(kong)間(jian),實現較大(da)的傳動(dong)比(bi)。具有體積小、質(zhi)量輕(qing)、傳動(dong)效率(lv)、工(gong)作平穩及(ji)(ji)噪聲小等特點(dian),被用來代替普(pu)通齒輪(lun)傳動(dong)而應用于(yu)現代機(ji)(ji)械中。該類機(ji)(ji)構(gou)的動(dong)態(tai)靜力(li)分析,無論對其傳動(dong)電機(ji)(ji)的選用及(ji)(ji)控制(zhi),還是對機(ji)(ji)構(gou)進行(xing)動(dong)靜態(tai)強度的計算與校核都十分重要(yao)。為此,外(wai)學(xue)(xue)者提出了具有不同特點(dian)的力(li)學(xue)(xue)方法(fa)及(ji)(ji)軟件。20世(shi)紀50年(nian)代末(mo)由美(mei)國學(xue)者所提出的鍵合圖方法就是其中之(zhi)一,在許(xu)多系(xi)統的動力學(xue)建模與(yu)分(fen)析中得到(dao)了成功的應(ying)用。
構(gou)成行星(xing)輪(lun)系(xi)的基本構(gou)件是(shi)太陽輪(lun)、行星(xing)輪(lun)及(ji)系(xi)桿。其運動(dong)特征(zheng)是(shi)太陽輪(lun)與(yu)行星(xing)輪(lun)外嚙合,行星(xing)輪(lun)同時繞自身軸線及(ji)系(xi)桿與(yu)太陽輪(lun)的共同軸線旋轉。由(you)此所形成的構(gou)件間非線性約(yue)束關系(xi),使其鍵(jian)合圖模型中的部(bu)分(fen)能元(yuan)件所對應的能量變(bian)量是(shi)非立的,從而(er)導致非線性微分(fen)因果環,給該類系(xi)統的計(ji)算機輔助建模及(ji)動(dong)態靜力分(fen)析帶(dai)來較大的代數困難。

銷售電話:400-066-2287
郵(you)箱:sales@szzhaowei.net
傳真:0755-27323949
郵編:518000
地址:深圳市(shi)寶安區(qu)燕(yan)羅街(jie)道燕(yan)川社區(qu)燕(yan)湖路62號



