機器人運動電機產品參數與定制開發
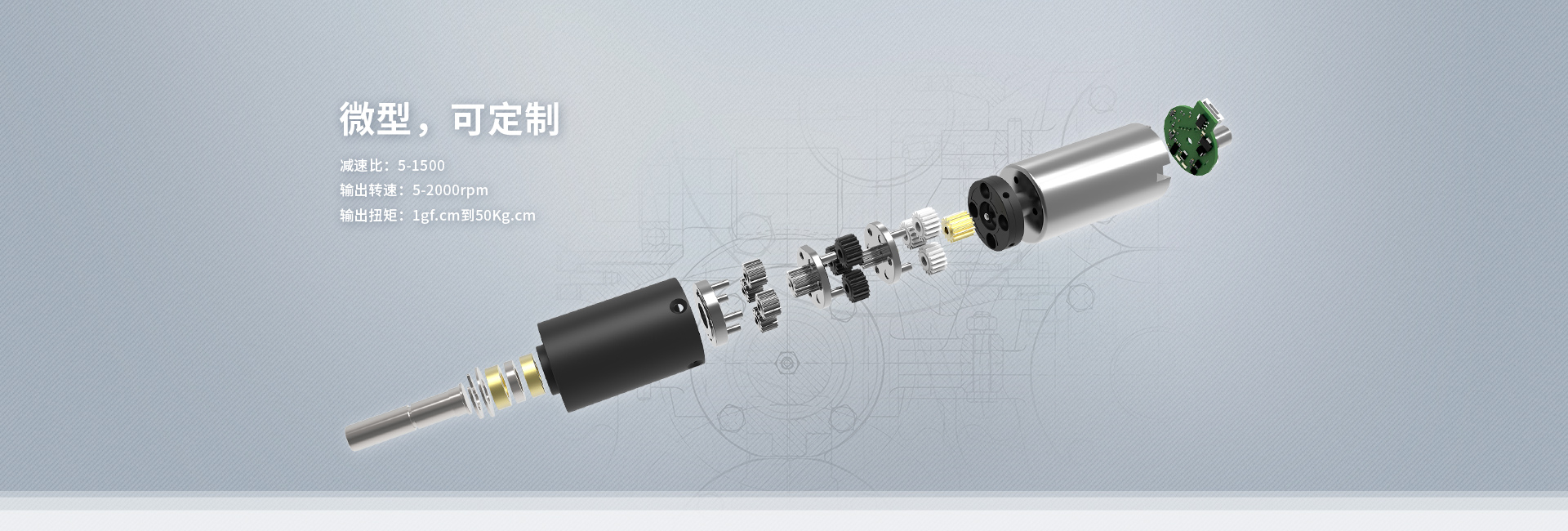
機器人運動電機是一種主要運用智能機器人驅動上的齒輪箱傳動模塊,也稱為機器人運動減速電機,主要傳動結構由驅動電機(微型馬達)、齒輪箱(減速器)組裝而成的減速傳動設備,具備減速、提升扭矩功能,保正機器人正常運動、驅動、行走等功能;驅動電機可以采用步進電機、直流電(dian)(dian)機(ji)、伺服電(dian)(dian)機(ji)作(zuo)為驅動(dong)源,齒輪(lun)箱(xiang)(xiang)可采(cai)用精密(mi)行(xing)星齒輪(lun)箱(xiang)(xiang)、塑膠齒輪(lun)箱(xiang)(xiang)、金(jin)屬齒輪(lun)箱(xiang)(xiang)、蝸(gua)輪(lun)蝸(gua)桿齒輪(lun)箱(xiang)(xiang)、圓柱(zhu)齒輪(lun)箱(xiang)(xiang)作(zuo)為減速(su)器;運用在(zai)不同領域的(de)機(ji)器人采(cai)用不同的(de)驅動(dong)電(dian)(dian)機(ji)齒輪(lun)箱(xiang)(xiang),齒輪(lun)箱(xiang)(xiang)回程間隙(xi)在(zai)2弧分內,傳動(dong)噪音在(zai)45DB內,減速(su)比在(zai)5-1500之間,輸出扭(niu)矩在(zai)1gf-cm到50KGf-cm之間,功率,電(dian)(dian)壓(ya),規(gui)格(ge),材質,使用壽命,齒輪(lun)箱(xiang)(xiang)結構類型,傳動(dong)系統方案按照實際運用需求定制開發(fa)而成,兆威機(ji)電(dian)(dian)提供一(yi)整套解決方案服務。
定制開發方案:
項目名稱:智能機(ji)器人輪式行走齒(chi)輪箱解(jie)決方案
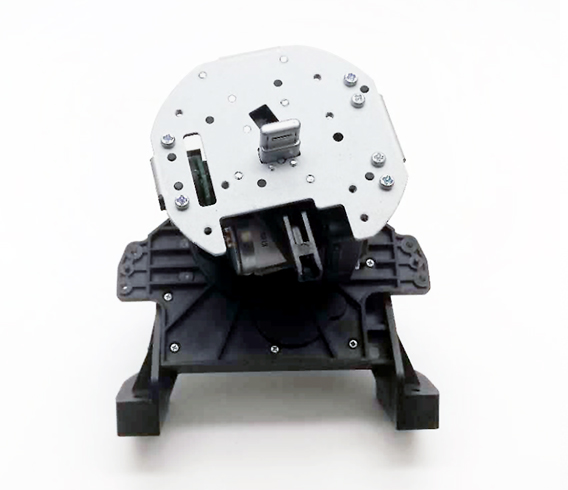
項目背景:機(ji)器人按運動(dong)(dong)方(fang)式分為(wei)輪式、腿式、履帶(dai)式、蛇(she)形(xing)式和復合式等(deng)方(fang)式。其(qi)中(zhong)輪式移動(dong)(dong)機(ji)器人在自主移動(dong)(dong)機(ji)器人領域占有較為(wei)重要的地位(wei),具有運動(dong)(dong)速度快、控制簡單等(deng)特點,在自動(dong)(dong)碼垛生(sheng)產線、無人駕駛車(che)輛等(deng)領域應(ying)用廣泛(fan)。
技術方案(an):機(ji)器人輪(lun)式行走驅動部分(fen)采用(yong)直(zhi)流電機(ji)和38mm行星齒輪(lun)箱組合,反對(dui)稱安裝方式。這(zhe)種方式可以在使輪(lun)對(dui)同軸(zhou),提(ti)供較大動力(通常電機(ji)外形尺寸和 功率成(cheng)一定(ding)比例)的情況下,減(jian)輕減(jian)速機(ji)輸出(chu)軸(zhou)受力點,大大縮短(duan)輪(lun)距,節約(yue) 空(kong)間(jian),以使機(ji)器人體積小(xiao)型化(hua)。