




倉儲機器人電機產品技術參數與定制開發
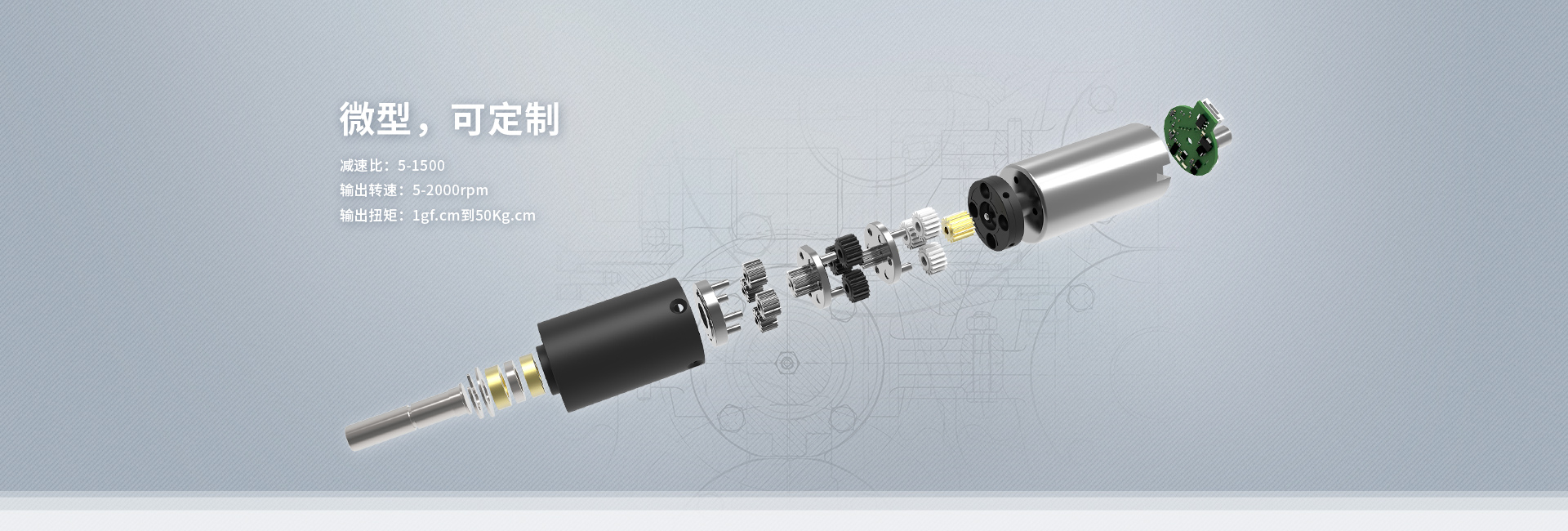
智能倉(cang)庫(ku)機(ji)(ji)(ji)(ji)(ji)器(qi)(qi)人(ren)(ren)(ren)是(shi)為(wei)滿足(zu)大型倉(cang)儲(chu)廠房(fang)車(che)間(jian)的(de)貨(huo)(huo)架調配、分(fen)(fen)揀(jian)(jian)(jian)、整(zheng)合(he)而研發(fa)的(de)機(ji)(ji)(ji)(ji)(ji)器(qi)(qi)人(ren)(ren)(ren)產品。該產品真正(zheng)實現了“貨(huo)(huo)架到人(ren)(ren)(ren)”的(de)工作(zuo)模式,主要(yao)由機(ji)(ji)(ji)(ji)(ji)器(qi)(qi)人(ren)(ren)(ren)本體和視(shi)覺導航傳感器(qi)(qi)等組成,智能倉(cang)庫(ku)機(ji)(ji)(ji)(ji)(ji)器(qi)(qi)人(ren)(ren)(ren)可(ke)(ke)將(jiang)裝滿貨(huo)(huo)物(wu)或書籍的(de)貨(huo)(huo)架舉起并快(kuai)(kuai)速(su)平穩的(de)將(jiang)貨(huo)(huo)架運(yun)(yun)送(song)到指定(ding)的(de)位置,待操作(zuo)完(wan)成后自動(dong)(dong)將(jiang)貨(huo)(huo)架放到指定(ding)的(de)地方等待下一次任務(wu)。可(ke)(ke)在(zai)控制(zhi)(zhi)臺的(de)調度(du)下將(jiang)貨(huo)(huo)架上(shang)面的(de)貨(huo)(huo)品進(jin)行分(fen)(fen)類(lei)排序(xu),將(jiang)同(tong)類(lei)商品集(ji)合(he)到同(tong)一貨(huo)(huo)架上(shang),這樣可(ke)(ke)以減(jian)少貨(huo)(huo)物(wu)的(de)運(yun)(yun)送(song)時(shi)間(jian),從而大幅度(du)提(ti)高倉(cang)儲(chu)效率。倉(cang)儲(chu)機(ji)(ji)(ji)(ji)(ji)器(qi)(qi)人(ren)(ren)(ren)電(dian)機(ji)(ji)(ji)(ji)(ji)是(shi)一種運(yun)(yun)用(yong)現代智慧(hui)物(wu)流倉(cang)儲(chu)系統中運(yun)(yun)輸(shu)、搬運(yun)(yun)、分(fen)(fen)揀(jian)(jian)(jian)機(ji)(ji)(ji)(ji)(ji)器(qi)(qi)人(ren)(ren)(ren)傳動(dong)(dong)系統中的(de)齒(chi)輪(lun)箱(xiang)電(dian)機(ji)(ji)(ji)(ji)(ji),具有(you)(you)驅動(dong)(dong)力大、速(su)度(du)更快(kuai)(kuai)、運(yun)(yun)行平穩、噪(zao)音低等優點;機(ji)(ji)(ji)(ji)(ji)器(qi)(qi)人(ren)(ren)(ren)小車(che)采用(yong)低壓伺(si)服(fu)驅動(dong)(dong),響應快(kuai)(kuai)速(su),縮短分(fen)(fen)揀(jian)(jian)(jian)時(shi)間(jian)。主要(yao)傳動(dong)(dong)結構由驅動(dong)(dong)電(dian)機(ji)(ji)(ji)(ji)(ji)(微型馬(ma)達)、齒(chi)輪(lun)箱(xiang)(減(jian)速(su)器(qi)(qi))集(ji)成制(zhi)(zhi)造組裝而成的(de)減(jian)速(su)齒(chi)輪(lun)箱(xiang)電(dian)機(ji)(ji)(ji)(ji)(ji)設備,驅動(dong)(dong)電(dian)機(ji)(ji)(ji)(ji)(ji)可(ke)(ke)采用(yong)直(zhi)(zhi)流電(dian)機(ji)(ji)(ji)(ji)(ji)、有(you)(you)刷電(dian)機(ji)(ji)(ji)(ji)(ji)、無刷電(dian)機(ji)(ji)(ji)(ji)(ji)、步(bu)進(jin)電(dian)機(ji)(ji)(ji)(ji)(ji)、伺(si)服(fu)電(dian)機(ji)(ji)(ji)(ji)(ji)作(zuo)為(wei)驅動(dong)(dong)源,齒(chi)輪(lun)箱(xiang)可(ke)(ke)采用(yong)行星(xing)齒(chi)輪(lun)箱(xiang)、精密齒(chi)輪(lun)箱(xiang)、金屬齒(chi)輪(lun)箱(xiang)、塑膠齒(chi)輪(lun)箱(xiang)作(zuo)為(wei)減(jian)速(su)器(qi)(qi);齒(chi)輪(lun)箱(xiang)傳動(dong)(dong)系統以及(ji)驅動(dong)(dong)電(dian)機(ji)(ji)(ji)(ji)(ji)技(ji)術參數(shu)(shu)是(shi)定(ding)制(zhi)(zhi)開(kai)發(fa)而成的(de),定(ding)制(zhi)(zhi)技(ji)術參數(shu)(shu)范圍,齒(chi)輪(lun)箱(xiang)直(zhi)(zhi)徑規格在(zai)3.4mm-38mm,減(jian)速(su)比在(zai)5-1500之間(jian),輸(shu)出扭矩(ju)在(zai)1gf-cm到50KGf-cm之間(jian),齒(chi)輪(lun)箱(xiang)回轉(zhuan)精度(du)1-2弧(hu)分(fen)(fen),齒(chi)輪(lun)傳動(dong)(dong)噪(zao)音在(zai)45DB以下的(de)精密行星(xing)齒(chi)輪(lun)箱(xiang).兆威機(ji)(ji)(ji)(ji)(ji)電(dian)股(gu)份有(you)(you)限公(gong)司提(ti)供一整(zheng)套定(ding)制(zhi)(zhi)開(kai)發(fa)解決方案。
定制開發案例:
項目名稱:智能機器人輪式行走齒輪箱解決方案
項目背景(jing):智(zhi)能機(ji)器(qi)人(ren)(ren)(ren)(ren)可以按預先編排(pai)的程序或人(ren)(ren)(ren)(ren)工(gong)智(zhi)能技術制(zhi)定的原則綱(gang)領(ling)行動,成熟智(zhi)能的產(chan)品可以取代人(ren)(ren)(ren)(ren)的工(gong)作(zuo),例如生產(chan)業、建筑業,或是危險的工(gong)作(zuo)。機(ji)器(qi)人(ren)(ren)(ren)(ren)按運動方(fang)(fang)式(shi)分為(wei)輪(lun)式(shi)、腿式(shi)、履帶式(shi)、蛇形式(shi)和復合式(shi)等(deng)方(fang)(fang)式(shi)。其中輪(lun)式(shi)移(yi)動機(ji)器(qi)人(ren)(ren)(ren)(ren)在(zai)自主移(yi)動機(ji)器(qi)人(ren)(ren)(ren)(ren)領(ling)域占有較為(wei)重(zhong)要的地位,具有運動速度快、控制(zhi)簡單等(deng)特點(dian),在(zai)自動碼垛(duo)生產(chan)線、無人(ren)(ren)(ren)(ren)駕駛(shi)車(che)輛等(deng)領(ling)域應(ying)用廣泛(fan)。
技(ji)術方案(an):機(ji)器(qi)(qi)人輪(lun)式行(xing)走驅動部分采用直流(liu)電(dian)機(ji)和38mm行(xing)星齒輪(lun)箱組合(he),反對(dui)(dui)稱安裝方式。這種方式可(ke)以在使輪(lun)對(dui)(dui)同軸,提供較大(da)(da)(da)動力(通常電(dian)機(ji)外形尺寸和功(gong)率成一定比例(li))的情況下,減輕減速機(ji)輸(shu)出軸受力點,大(da)(da)(da)大(da)(da)(da)縮短(duan)輪(lun)距(ju),節(jie)約(yue) 空間,以使機(ji)器(qi)(qi)人體積小型化。
解決方(fang)案:基于現場試驗和理論(lun)分析,爬坡能(neng)力(li)差(cha)主要(yao)是(shi)由于驅動(dong)系統(tong)驅動(dong)力(li)不足導(dao)致(zhi)的。而導(dao)致(zhi)驅動(dong)力(li)不足的原(yuan)因(yin)多是(shi)設計階段選用的直線(xian)導(dao)軌(gui)摩擦因(yin)數太(tai)過于理想化,為解決系統(tong)負載(zai)加大后,其導(dao)軌(gui)的摩擦因(yin)數變化,我們的行星 齒輪箱(xiang)(xiang)結構(gou)擁有(you)二級(ji)(ji)、三級(ji)(ji)、四級(ji)(ji)傳動(dong)變化可根據(ju)智能(neng)機器(qi)人的行走(zou)驅動(dong)馬(ma)達的設計需求(qiu)更換減(jian)速比(bi)及調整齒 輪箱(xiang)(xiang)的輸入轉速及力(li)矩。
