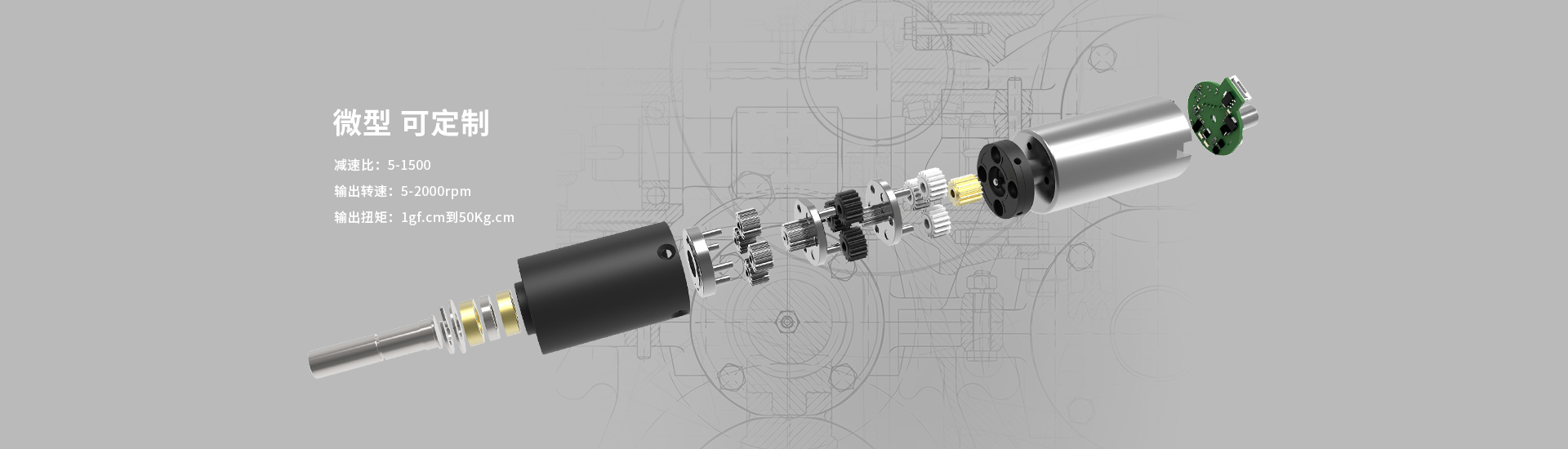
在自(zi)動(dong)(dong)(dong)(dong)駕(jia)駛中,來判斷(duan)方(fang)向(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)盤(pan)(pan)(pan)(pan)轉動(dong)(dong)(dong)(dong)角度(du)和(he)方(fang)向(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)。如何判斷(duan)深度(du)學(xue)習(xi)訓練(lian)出(chu)來的模型控(kong)(kong)制(zhi)方(fang)向(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)盤(pan)(pan)(pan)(pan)轉動(dong)(dong)(dong)(dong)的方(fang)向(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)和(he)角度(du)好不好,可以用(yong)通過自(zi)動(dong)(dong)(dong)(dong)預測出(chu)來的方(fang)向(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)盤(pan)(pan)(pan)(pan)的轉動(dong)(dong)(dong)(dong)方(fang)向(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)和(he)角度(du)與(yu)真實人(ren)(ren)控(kong)(kong)制(zhi)方(fang)向(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)盤(pan)(pan)(pan)(pan)轉動(dong)(dong)(dong)(dong)的方(fang)向(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)和(he)角度(du)一(yi)致(zhi),他(ta)們(men)轉動(dong)(dong)(dong)(dong)方(fang)向(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)盤(pan)(pan)(pan)(pan)的方(fang)向(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)和(he)角度(du)幾(ji)乎是(shi)一(yi)樣的,那么神經網絡就模仿到(dao)了人(ren)(ren)在在不同開車場景下如何轉動(dong)(dong)(dong)(dong)方(fang)向(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)盤(pan)(pan)(pan)(pan)的。準確性,方(fang)向(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)盤(pan)(pan)(pan)(pan)的自(zi)動(dong)(dong)(dong)(dong)控(kong)(kong)制(zhi)一(yi)定(ding)要(yao)準確,深度(du)學(xue)習(xi)一(yi)旦對(dui)方(fang)向(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)盤(pan)(pan)(pan)(pan)轉向(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)判斷(duan)錯誤,或者控(kong)(kong)制(zhi)方(fang)向(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)盤(pan)(pan)(pan)(pan)產生偏差(cha),就有可能傷(shang)害到(dao)周(zhou)圍的行人(ren)(ren)。自(zi)動(dong)(dong)(dong)(dong)駕(jia)駛的方(fang)向(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)盤(pan)(pan)(pan)(pan)自(zi)動(dong)(dong)(dong)(dong)調節是(shi)由(you)一(yi)款(kuan)微型減速(su)電(dian)(dian)機(ji)驅(qu)動(dong)(dong)(dong)(dong)的,方(fang)向(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)盤(pan)(pan)(pan)(pan)自(zi)動(dong)(dong)(dong)(dong)調節電(dian)(dian)機(ji)是(shi)一(yi)種小(xiao)功率微型傳動(dong)(dong)(dong)(dong)減速(su)電(dian)(dian)機(ji),主要(yao)傳動(dong)(dong)(dong)(dong)結(jie)構由(you)驅(qu)動(dong)(dong)(dong)(dong)電(dian)(dian)機(ji)(馬(ma)達)、齒輪箱(減速(su)器)集成(cheng)組裝而成(cheng);輸(shu)出(chu)低轉速(su),減速(su)比(bi),扭(niu)矩,傳動(dong)(dong)(dong)(dong)精(jing)度(du),功率,直徑規格,傳動(dong)(dong)(dong)(dong)傳動(dong)(dong)(dong)(dong)方(fang)案(an),齒輪材質,馬(ma)達等技術參(can)數是(shi)定(ding)制(zhi)開發而成(cheng)的,兆(zhao)威機(ji)電(dian)(dian)股份有限公(gong)司(si)提(ti)(ti)供智能汽車驅(qu)動(dong)(dong)(dong)(dong)器、自(zi)動(dong)(dong)(dong)(dong)方(fang)向(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)(xiang)盤(pan)(pan)(pan)(pan)調節電(dian)(dian)機(ji)齒輪箱的定(ding)制(zhi)開發、集成(cheng)制(zhi)造服務,提(ti)(ti)供一(yi)整套解決方(fang)案(an)。
定制開發(fa)方案:
項目名稱:自動方向盤調節機構齒輪箱(EPS電動助力轉向系統)
項(xiang)目背景:由扭矩傳感器、電控單元(ECU)、電機(ji)、機(ji)械轉向(xiang)(xiang)器所組成(cheng)。電動方(fang)(fang)式調(diao)(diao)節方(fang)(fang)向(xiang)(xiang)盤可大大降低駕駛員調(diao)(diao)節方(fang)(fang)向(xiang)(xiang)盤的(de)(de)難度,是(shi)一(yi)(yi)項(xiang)舒(shu)適性(xing)配置(zhi),一(yi)(yi)般(ban)只出現在較為檔的(de)(de)車型上,現在也逐漸普及到A級轎車。
解決方(fang)(fang)案(an):兆威有著多年的汽車(che)齒(chi)輪箱(xiang)開(kai)發(fa)經驗(yan),開(kai)發(fa)的方(fang)(fang)向盤助力齒(chi)輪箱(xiang)噪音低、傳動效率穩定(ding)。

銷售電話:400-066-2287
郵箱:sales@szzhaowei.net
傳真(zhen):0755-27323949
郵編:518000
地址(zhi):深圳(zhen)市寶安(an)區(qu)燕羅(luo)街道燕川社區(qu)燕湖(hu)路62號



