工業機器人舵機產品技術參數與定制開發
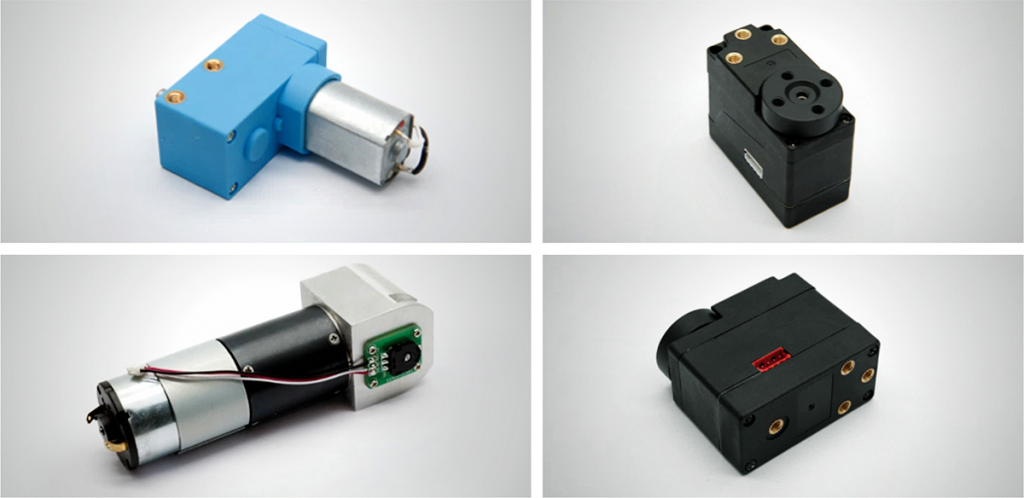
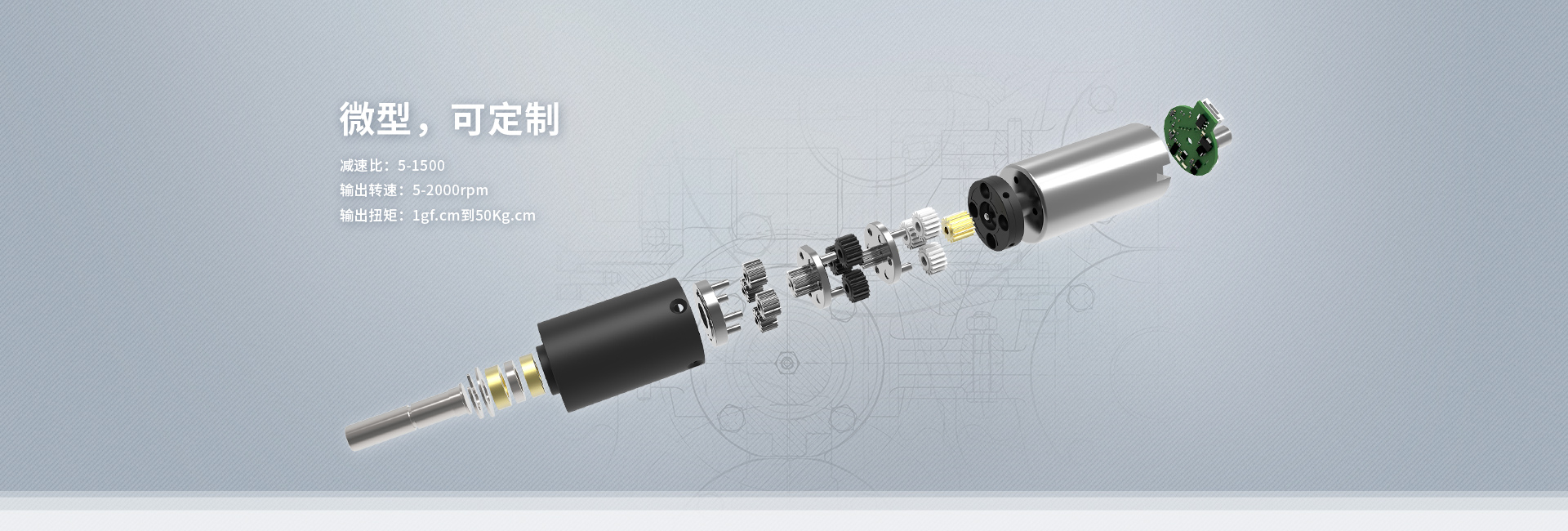
工業(ye)機(ji)(ji)(ji)(ji)(ji)器人舵(duo)(duo)機(ji)(ji)(ji)(ji)(ji)全稱是工業(ye)機(ji)(ji)(ji)(ji)(ji)器人舵(duo)(duo)機(ji)(ji)(ji)(ji)(ji)齒(chi)輪(lun)箱(xiang)(xiang)(xiang),是一(yi)種運(yun)用在(zai)(zai)機(ji)(ji)(ji)(ji)(ji)器人關節上的(de)(de)一(yi)種傳動(dong)(dong)(dong)齒(chi)輪(lun)箱(xiang)(xiang)(xiang)電(dian)機(ji)(ji)(ji)(ji)(ji),主要傳動(dong)(dong)(dong)結(jie)(jie)構由驅(qu)(qu)動(dong)(dong)(dong)電(dian)機(ji)(ji)(ji)(ji)(ji)(微(wei)型馬達)、齒(chi)輪(lun)箱(xiang)(xiang)(xiang)(減(jian)速器)組(zu)裝而(er)成(cheng)的(de)(de)減(jian)速電(dian)機(ji)(ji)(ji)(ji)(ji)傳動(dong)(dong)(dong)設備;不(bu)同型號、類型的(de)(de)工業(ye)機(ji)(ji)(ji)(ji)(ji)器人舵(duo)(duo)機(ji)(ji)(ji)(ji)(ji)齒(chi)輪(lun)箱(xiang)(xiang)(xiang)的(de)(de)型號、參數(shu)、性能(neng)也不(bu)一(yi)樣,通常(chang)采用定(ding)制(zhi)(zhi)技術參數(shu)開(kai)發(fa)而(er)成(cheng),諸(zhu)如傳動(dong)(dong)(dong)精度、傳動(dong)(dong)(dong)噪音、使用壽命、減(jian)速比(bi)、輸出扭矩(ju)等技術參數(shu),以及選擇驅(qu)(qu)動(dong)(dong)(dong)電(dian)機(ji)(ji)(ji)(ji)(ji)類型,齒(chi)輪(lun)箱(xiang)(xiang)(xiang)傳動(dong)(dong)(dong)結(jie)(jie)構系統方式是定(ding)制(zhi)(zhi)開(kai)發(fa)而(er)成(cheng),兆(zhao)威(wei)機(ji)(ji)(ji)(ji)(ji)電(dian)股份有限公司提供(gong)一(yi)整(zheng)套(tao)解(jie)決方案服(fu)務,提供(gong)工業(ye)機(ji)(ji)(ji)(ji)(ji)器人舵(duo)(duo)機(ji)(ji)(ji)(ji)(ji)齒(chi)輪(lun)箱(xiang)(xiang)(xiang)的(de)(de)定(ding)制(zhi)(zhi)開(kai)發(fa)服(fu)務,開(kai)發(fa)參數(shu)在(zai)(zai)減(jian)速比(bi)在(zai)(zai)5-1500之間,輸出扭矩(ju)在(zai)(zai)1gf-cm到(dao)50KGf-cm之間,齒(chi)輪(lun)箱(xiang)(xiang)(xiang)回轉精度1-2弧分,齒(chi)輪(lun)傳動(dong)(dong)(dong)噪音在(zai)(zai)45DB以下的(de)(de)精密行星(xing)齒(chi)輪(lun)箱(xiang)(xiang)(xiang),按照(zhao)需求設計齒(chi)輪(lun)箱(xiang)(xiang)(xiang)傳動(dong)(dong)(dong)方案。
定制開發哪里:
項目名稱:編程機器人舵機傳動方案
項(xiang)目介紹:編程機器人(ren)驅(qu)動(dong)(dong)機構分為(wei)旋轉(zhuan)驅(qu)動(dong)(dong)方式(shi)和直線驅(qu)動(dong)(dong)方式(shi)。由于旋轉(zhuan)驅(qu)動(dong)(dong)的(de)旋轉(zhuan) 軸強度高(gao)(gao)(gao)、摩(mo)擦小、可靠性好(hao)等(deng)優點(dian),在(zai)結(jie)構設計中應(ying)盡量多采(cai)用。但是在(zai)行 走機構關節(jie)中,完全采(cai)用旋轉(zhuan)驅(qu)動(dong)(dong)實(shi)現關節(jie)伸縮有如(ru)下缺點(dian): 1)旋轉(zhuan)運(yun)(yun)動(dong)(dong)雖然也能轉(zhuan)化的(de)到直線運(yun)(yun)動(dong)(dong),但在(zai)高(gao)(gao)(gao)速(su)運(yun)(yun)動(dong)(dong)時,關節(jie)伸縮的(de)加速(su)度不 能忽視,它可能產生大噪(zao)音; 2)為(wei)了提高(gao)(gao)(gao)著地點(dian)選擇的(de)靈活性,還必須增(zeng)加直線驅(qu)動(dong)(dong)系統(tong),笨重復雜。
解(jie)決方(fang)案:兆威齒(chi)(chi)(chi)輪(lun)電機(ji)終于做到了微(wei)型大(da)扭矩的(de)舵(duo)機(ji)傳(chuan)動(dong)(dong)結構,其動(dong)(dong)力(li)類(lei)舵(duo)機(ji)行星齒(chi)(chi)(chi)輪(lun)的(de)模(mo)數(shu)可開發至 M=0.05,每個齒(chi)(chi)(chi)輪(lun)的(de)齒(chi)(chi)(chi)距(ju)比一根頭發小(xiao)。兆威動(dong)(dong)力(li)類(lei)舵(duo)機(ji)減速器(qi)(qi)(qi)齒(chi)(chi)(chi)輪(lun)箱通過(guo)多(duo)種調試性能:可承受振動(dong)(dong)、沖擊以及高低溫差(cha);通 過(guo)低電磁干擾、低噪(zao)音測試,從而獲得低噪(zao)音、耗能低壽命長的(de)產品特(te)性。兆威在微(wei)型傳(chuan)動(dong)(dong)系統(tong)方(fang)面,配合機(ji)器(qi)(qi)(qi)人角(jiao)度(du)傳(chuan)感(gan)碼盤 幫助編程機(ji)器(qi)(qi)(qi)人動(dong)(dong)力(li)類(lei)舵(duo)機(ji)減速器(qi)(qi)(qi)實現動(dong)(dong)作行為的(de)六自由度(du),應用(yong)于編程機(ji)器(qi)(qi)(qi)人的(de)角(jiao)度(du)傳(chuan)感(gan)器(qi)(qi)(qi)和齒(chi)(chi)(chi)輪(lun)傳(chuan)動(dong)(dong)裝置(zhi),提高了機(ji)器(qi)(qi)(qi)人的(de) 關(guan)節控(kong)制,讓機(ji)器(qi)(qi)(qi)人關(guan)節轉動(dong)(dong)和其它可移動(dong)(dong)部位的(de)位置(zhi)更具靈活。