機(ji)(ji)(ji)械(xie)手(shou)(shou)是(shi)指能(neng)模仿人(ren)手(shou)(shou)和(he)(he)臂(bei)的(de)某些(xie)動(dong)(dong)作(zuo)(zuo)功能(neng),用(yong)以(yi)按固定(ding)程序抓(zhua)取、搬運(yun)物件或(huo)操(cao)作(zuo)(zuo)工具的(de)自(zi)動(dong)(dong)操(cao)作(zuo)(zuo)裝置。機(ji)(ji)(ji)械(xie)手(shou)(shou)是(shi)早(zao)出(chu)(chu)現的(de)工業(ye)機(ji)(ji)(ji)器(qi)(qi)(qi)人(ren),也是(shi)早(zao)出(chu)(chu)現的(de)現代機(ji)(ji)(ji)器(qi)(qi)(qi)人(ren),它可(ke)代替人(ren)的(de)繁重勞(lao)動(dong)(dong)以(yi)實現生產的(de)機(ji)(ji)(ji)械(xie)化和(he)(he)自(zi)動(dong)(dong)化,能(neng)在有(you)害環(huan)境下操(cao)作(zuo)(zuo)以(yi)保護人(ren)身安(an)全(quan)。機(ji)(ji)(ji)械(xie)手(shou)(shou)爪主要分為(wei)兩部分,即(ji)手(shou)(shou)臂(bei)和(he)(he)末端(duan)執行器(qi)(qi)(qi)。手(shou)(shou)臂(bei)利用(yong)關節(jie)的(de)運(yun)動(dong)(dong)帶(dai)動(dong)(dong)末端(duan)執行器(qi)(qi)(qi)的(de)動(dong)(dong)作(zuo)(zuo),達到預定(ding)的(de)位置進行預定(ding)的(de)操(cao)作(zuo)(zuo)。機(ji)(ji)(ji)器(qi)(qi)(qi)人(ren)手(shou)(shou)抓(zhua)電(dian)(dian)(dian)機(ji)(ji)(ji)是(shi)一種(zhong)小功率微(wei)型(xing)傳(chuan)(chuan)動(dong)(dong)減(jian)速電(dian)(dian)(dian)機(ji)(ji)(ji)齒(chi)輪(lun)(lun)箱(xiang)(xiang),主要傳(chuan)(chuan)動(dong)(dong)結構由驅(qu)(qu)(qu)動(dong)(dong)電(dian)(dian)(dian)機(ji)(ji)(ji)(微(wei)型(xing)電(dian)(dian)(dian)機(ji)(ji)(ji))、齒(chi)輪(lun)(lun)箱(xiang)(xiang)(減(jian)速器(qi)(qi)(qi))組裝而(er)(er)成的(de)減(jian)速傳(chuan)(chuan)動(dong)(dong)設備,運(yun)用(yong)在機(ji)(ji)(ji)器(qi)(qi)(qi)人(ren)手(shou)(shou)臂(bei)、機(ji)(ji)(ji)械(xie)手(shou)(shou)傳(chuan)(chuan)動(dong)(dong)齒(chi)輪(lun)(lun)箱(xiang)(xiang)電(dian)(dian)(dian)機(ji)(ji)(ji)模塊上(shang),簡稱(cheng)為(wei)“機(ji)(ji)(ji)器(qi)(qi)(qi)人(ren)手(shou)(shou)抓(zhua)電(dian)(dian)(dian)機(ji)(ji)(ji)”;驅(qu)(qu)(qu)動(dong)(dong)電(dian)(dian)(dian)機(ji)(ji)(ji)可(ke)采(cai)用(yong)直(zhi)流電(dian)(dian)(dian)機(ji)(ji)(ji)、有(you)刷電(dian)(dian)(dian)機(ji)(ji)(ji)、無刷電(dian)(dian)(dian)機(ji)(ji)(ji)、伺服(fu)電(dian)(dian)(dian)機(ji)(ji)(ji)、步進電(dian)(dian)(dian)機(ji)(ji)(ji)、空心杯電(dian)(dian)(dian)機(ji)(ji)(ji)、微(wei)型(xing)馬(ma)達作(zuo)(zuo)為(wei)驅(qu)(qu)(qu)動(dong)(dong)器(qi)(qi)(qi),齒(chi)輪(lun)(lun)箱(xiang)(xiang)可(ke)采(cai)用(yong)行星(xing)齒(chi)輪(lun)(lun)箱(xiang)(xiang)、圓(yuan)柱齒(chi)輪(lun)(lun)箱(xiang)(xiang)、蝸(gua)輪(lun)(lun)蝸(gua)桿齒(chi)輪(lun)(lun)箱(xiang)(xiang)作(zuo)(zuo)為(wei)減(jian)速器(qi)(qi)(qi);技(ji)術參(can)(can)數通常是(shi)定(ding)制(zhi)開(kai)發而(er)(er)成,例如輸(shu)出(chu)(chu)功率、減(jian)速比、輸(shu)出(chu)(chu)扭(niu)矩(ju)、電(dian)(dian)(dian)壓、齒(chi)輪(lun)(lun)箱(xiang)(xiang)結構、驅(qu)(qu)(qu)動(dong)(dong)電(dian)(dian)(dian)機(ji)(ji)(ji)類型(xing)、傳(chuan)(chuan)動(dong)(dong)噪(zao)音、傳(chuan)(chuan)動(dong)(dong)精度等技(ji)術參(can)(can)數是(shi)定(ding)制(zhi)開(kai)發而(er)(er)成;兆威機(ji)(ji)(ji)電(dian)(dian)(dian)股(gu)份有(you)限公司定(ding)制(zhi)機(ji)(ji)(ji)器(qi)(qi)(qi)人(ren)手(shou)(shou)抓(zhua)電(dian)(dian)(dian)機(ji)(ji)(ji)齒(chi)輪(lun)(lun)箱(xiang)(xiang)技(ji)術參(can)(can)數范圍(wei)在直(zhi)徑規(gui)格在3.4mm-38mm之(zhi)間,電壓在24V以(yi)下,輸出功率在(zai)50W以下,輸出轉速5rpm到(dao)1500rpm之間,速比范(fan)圍2-2000之間,輸出(chu)力(li)矩1gfNaN到50KgNaN之間微型傳(chuan)動(dong)齒輪(lun)箱(xiang)減(jian)速系統。

項目名稱:機器人關節齒輪箱解決方案
項目背景:在溝通快(kuai)速(su)響應(ying)交互中,直流(liu)減速(su)電(dian)機用于傳(chuan)動機器人的關節,要(yao)求有較大(da)功率質量(liang)(liang)比和扭矩(ju)慣量(liang)(liang)比、高(gao)啟(qi)動轉(zhuan)矩(ju)、低慣量(liang)(liang)和較寬廣(guang)且平滑的調速(su)范圍。特別是機器人末端執行器(手爪)應采用體積和(he)質量較小,并且能夠擁有(you)短時過載能力較大的關節電機。
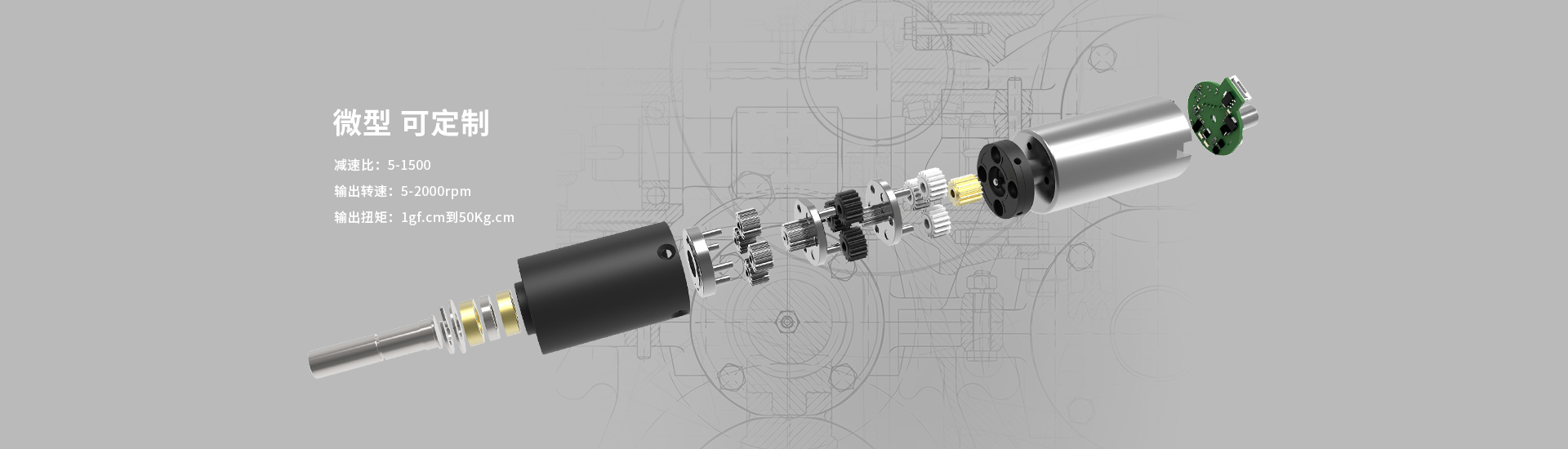
解決方案:兆威(wei)機(ji)(ji)(ji)器人(ren)微型關節(jie)齒(chi)輪箱研(yan)發(fa)生產,通過發(fa)展(zhan)耐磨材料技(ji)術(shu)、加工工藝優化(hua)技(ji)術(shu)、潤滑(hua)技(ji)術(shu)、裝配技(ji)術(shu)及壽(shou)命(ming)檢(jian)測技(ji)術(shu)以及傳(chuan)動(dong)機(ji)(ji)(ji)理的探索,提高了智能機(ji)(ji)(ji)器人(ren)感知(zhi)與識別、機(ji)(ji)(ji)構與傳(chuan)動(dong)、控(kong)制與交互等方面的性能。 全系列精密機(ji)器人用減速(su)電機(ji)行(xing)星齒輪箱(xiang),直(zhi)徑(jing)3.4mm-38mm,功率:0.01-40W,輸出(chu)轉(zhuan)速5-2000rpm,減(jian)速比5-1500,輸出扭矩1gfNaN到50KgNaN。

銷售電話:400-066-2287
郵箱:sales@szzhaowei.net
傳真:0755-27323949
郵編:518000
地址:深圳市寶安區燕(yan)羅街道(dao)燕(yan)川(chuan)社區燕(yan)湖(hu)路62號


