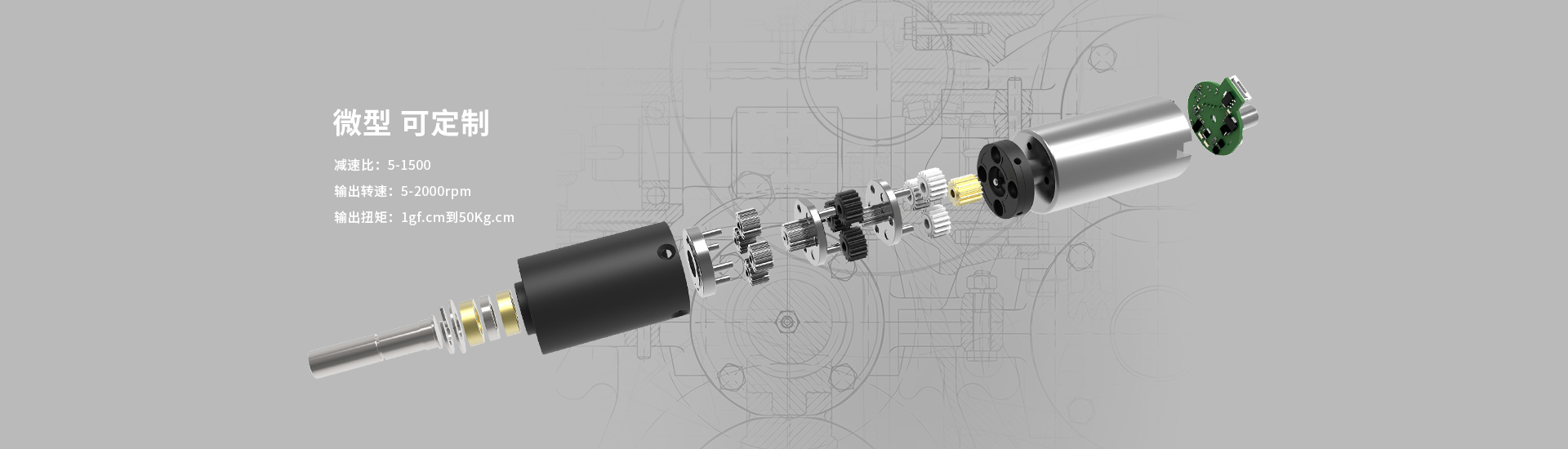
攝像頭微型(xing)刮(gua)(gua)水電(dian)(dian)(dian)(dian)(dian)機(ji)(ji)(ji)是(shi)一種小功率傳(chuan)動(dong)齒(chi)輪(lun)(lun)電(dian)(dian)(dian)(dian)(dian)機(ji)(ji)(ji),主(zhu)要傳(chuan)動(dong)結構由驅(qu)動(dong)電(dian)(dian)(dian)(dian)(dian)機(ji)(ji)(ji)、齒(chi)輪(lun)(lun)箱(減(jian)速器(qi))集成(cheng)制(zhi)造組裝而(er)成(cheng)的減(jian)速齒(chi)輪(lun)(lun)箱傳(chuan)動(dong)設備;驅(qu)動(dong)電(dian)(dian)(dian)(dian)(dian)機(ji)(ji)(ji)可采(cai)(cai)用(yong)直流有(you)刷電(dian)(dian)(dian)(dian)(dian)機(ji)(ji)(ji)、直流無刷電(dian)(dian)(dian)(dian)(dian)機(ji)(ji)(ji)、步進(jin)電(dian)(dian)(dian)(dian)(dian)機(ji)(ji)(ji)、空(kong)心杯電(dian)(dian)(dian)(dian)(dian)機(ji)(ji)(ji)、伺服電(dian)(dian)(dian)(dian)(dian)機(ji)(ji)(ji)作為(wei)驅(qu)動(dong)源,齒(chi)輪(lun)(lun)箱可采(cai)(cai)用(yong)行(xing)星齒(chi)輪(lun)(lun)箱、圓柱齒(chi)輪(lun)(lun)箱、蝸輪(lun)(lun)蝸桿(gan)齒(chi)輪(lun)(lun)箱、普通齒(chi)輪(lun)(lun)箱作為(wei)減(jian)速器(qi);攝像頭微型(xing)刮(gua)(gua)水電(dian)(dian)(dian)(dian)(dian)機(ji)(ji)(ji)通常采(cai)(cai)用(yong)定(ding)制(zhi)技術(shu)參(can)(can)數(shu)開發(fa)而(er)成(cheng),例如(ru)輸出功率,電(dian)(dian)(dian)(dian)(dian)壓,減(jian)速比(bi),輸出扭矩(ju),傳(chuan)動(dong)精度(du),傳(chuan)動(dong)噪音,傳(chuan)動(dong)精度(du)等技術(shu)參(can)(can)數(shu)是(shi)定(ding)制(zhi)開發(fa)而(er)成(cheng);兆威機(ji)(ji)(ji)電(dian)(dian)(dian)(dian)(dian)股份有(you)限公(gong)司致力于研(yan)發(fa)、設計、制(zhi)造微型(xing)減(jian)速電(dian)(dian)(dian)(dian)(dian)機(ji)(ji)(ji),定(ding)制(zhi)技術(shu)參(can)(can)數(shu)范圍,直徑(jing)規格在3.4mm-38mm之間,電壓在24V以下,輸(shu)出功率在50W以(yi)下(xia),輸出(chu)轉速(su)5rpm到1500rpm之間,速(su)比范(fan)圍2-2000之間,輸出力矩1gfNaN到50KgNaN之間微型傳動齒輪箱減速系統。

項目名稱:快貓下載地址:物流攝像頭齒輪箱解決方案
項目背景:隨(sui)著(zhu)電(dian)子(zi)商務高速發展態勢,物流配送始終是(shi)電(dian)子(zi)商務發展的瓶頸。特別是(shi)物流配送體系還不夠完善、物流成 本居高(gao)不下、服務質量和(he)效率低下、配送范(fan)圍不夠大、嚴重阻礙了電子商務的(de)發展。
技術方案(an):兆威攝像頭齒輪箱方案(an)用行業較(jiao)小的8MM行星齒(chi) 輪箱,實現小體積(ji)大(da)力(li)矩的需求。為實現攝像頭不(bu)同(tong)角度和位置的 傳遞扭矩差異化,兆威(wei)設計了多層可(ke)變換的傳動比機構,產(chan)品擁有(you) 二級、三級、四(si)級傳動變化(hua)可根據攝像(xiang)頭電機(ji)的設計需(xu)求更換減(jian)速 比及調整齒輪箱(xiang)的(de)輸入轉速及力矩,即可(ke)實現各(ge)視覺系(xi)統(tong)中的(de)攝像 頭(tou)翻轉(zhuan)、側邊攝(she)(she)像頭(tou)翻轉(zhuan)機(ji)頂端攝(she)(she)像頭(tou)旋出(chu)、伸縮攝(she)(she)像頭(tou)等需求。
解決(jue)方(fang)案:除了(le)解決(jue)攝像頭(tou)多角度(du)的(de)智能旋(xuan)轉需求,兆(zhao)威(wei)攝像頭(tou)齒(chi)輪箱在研發設計(ji)前(qian)期會(hui)利用(yong)的(de)齒(chi)輪箱綜合設計(ji)平(ping)臺,去實現(xian)漸開(kai)線行星齒(chi)輪系(xi)統(tong)、錐齒(chi)輪、面齒(chi)輪等機構的(de)自動(dong) 化(hua)參數設(she)計,通過優化(hua)齒輪參數,如變位系數、齒系數、壓力角、中(zhong)心距等,使嚙(nie)入沖(chong)擊(ji)速(su)度降小,嚙(nie)出沖(chong)擊(ji)速(su)度與嚙(nie)入沖(chong)擊(ji)速(su)度的比值(zhi)(zhi)處(chu)于某一(yi)數值(zhi)(zhi)范圍,減小或(huo)嚙(nie)合節圓沖(chong)擊(ji)的齒輪設(she)計方法,解決產(chan)品在(zai)運轉(zhuan)靜音(微弱噪音)需求,降低產(chan)品使用過程(cheng)中(zhong)的噪音問(wen)題。




