




精密電機減速器產品技術參數
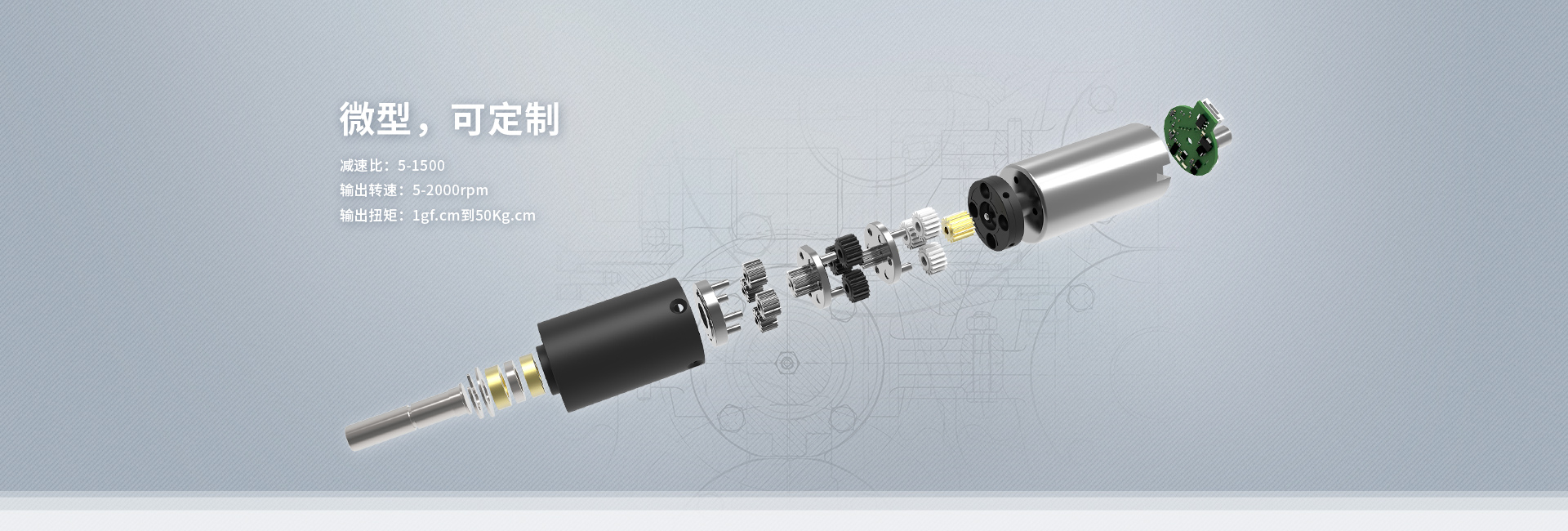
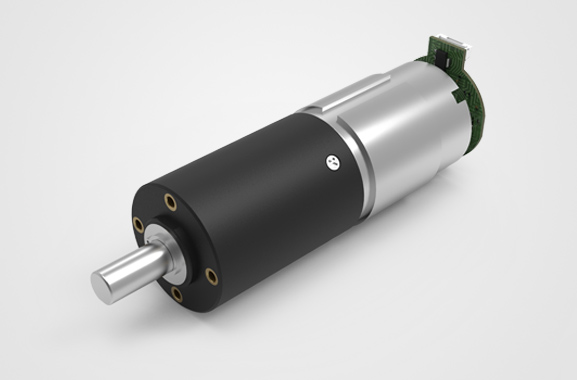
精密電機減速器的齒輪箱回轉精度可以做到1弧分內,主要傳動結構由驅動電機(馬達)、齒輪箱(減速器)組裝而成的的齒輪減速器;驅動(dong)電機(ji)可采(cai)用(yong)直流電機(ji)、步進電機(ji)、電動(dong)馬達作為動(dong)力輸出源(yuan),高(gao)精(jing)度(du)的齒(chi)輪(lun)箱(xiang)減(jian)速器,通常采(cai)用(yong)精(jing)密(mi)行(xing)星(xing)齒(chi)輪(lun)箱(xiang),行(xing)星(xing)齒(chi)輪(lun)的回轉(zhuan)間(jian)隙可以做到1弧分(fen)內;這種精(jing)密(mi)電機(ji)減(jian)速器廣泛運用(yong)在機(ji)器人(ren)傳(chuan)動(dong)、工業機(ji)械設(she)(she)備自動(dong)化、精(jing)密(mi)醫療器械、智能家居、通訊設(she)(she)備、汽車傳(chuan)動(dong)等領域。
精密電機減速器產品技術參數:
精(jing)(jing)密(mi)電機減速器(qi)屬于小型減速器(qi)常用參數技術范圍在(zai)(zai)直(zhi)徑規格在(zai)(zai)3.4mm-38mm,輸出轉速在(zai)(zai)5-2000rpm,減速比在(zai)(zai)5-1500之間,傳動(dong)噪音在(zai)(zai)45分(fen)貝(bei)(DB)以下,齒(chi)(chi)輪(lun)箱回轉精(jing)(jing)度在(zai)(zai)2弧(hu)分(fen)以下;行(xing)星齒(chi)(chi)輪(lun)箱的背間隙精(jing)(jing)度等(deng)級(ji)(ji)(ji)(ji)指(zhi)的是齒(chi)(chi)輪(lun)精(jing)(jing)度等(deng)級(ji)(ji)(ji)(ji),我國標淮(huai)JB179-60對齒(chi)(chi)輪(lun)規定(ding)了12個精(jing)(jing)度等(deng)級(ji)(ji)(ji)(ji),它們按(an)精(jing)(jing)度高低依次稱為1級(ji)(ji)(ji)(ji)、2級(ji)(ji)(ji)(ji)…7級(ji)(ji)(ji)(ji)、8級(ji)(ji)(ji)(ji)、9級(ji)(ji)(ji)(ji)、l0級(ji)(ji)(ji)(ji)、11級(ji)(ji)(ji)(ji)和(he)12級(ji)(ji)(ji)(ji)(1級(ji)(ji)(ji)(ji)、2級(ji)(ji)(ji)(ji)及12級(ji)(ji)(ji)(ji)精(jing)(jing)度日前尚無規范)。
齒(chi)輪(lun)(lun)精(jing)(jing)(jing)度(du)(du)(du)每個等(deng)級都包(bao)括(kuo)三個規范:齒(chi)輪(lun)(lun)運動(dong)精(jing)(jing)(jing)度(du)(du)(du),齒(chi)輪(lun)(lun)工作(zuo)平(ping)穩(wen)性(xing)精(jing)(jing)(jing)度(du)(du)(du)和齒(chi)的接(jie)觸(chu)(chu)精(jing)(jing)(jing)度(du)(du)(du)。運動(dong)精(jing)(jing)(jing)度(du)(du)(du)規范決定(ding)齒(chi)輪(lun)(lun)在一轉(zhuan)內迥轉(zhuan)角的全(quan)部誤差(cha)數(shu)值,借此(ci)傳(chuan)動(dong)速比的恒定(ding)。齒(chi)輪(lun)(lun)工作(zuo)平(ping)穩(wen)性(xing)規范決定(ding)齒(chi)輪(lun)(lun)在一轉(zhuan)內迥轉(zhuan)角的全(quan)部誤差(cha)中多次重復的數(shu)值,借此(ci)傳(chuan)動(dong)平(ping)穩(wen),減少振動(dong)和噪(zao)音。齒(chi)的接(jie)觸(chu)(chu)精(jing)(jing)(jing)度(du)(du)(du)規范決定(ding)齒(chi)輪(lun)(lun)傳(chuan)動(dong)中嚙合(he)齒(chi)接(jie)觸(chu)(chu)斑點的比例大小(xiao),借此(ci)齒(chi)面載荷分布均(jun)勻;另外還有齒(chi)輪(lun)(lun)運行間隙精(jing)(jing)(jing)度(du)(du)(du)調整方法:
1、調整間(jian)隙法:減速機在運動過程中會產生(sheng)摩(mo)擦,并引(yin)起相(xiang)關零件之(zhi)間(jian)的尺寸、形(xing)狀和表面(mian)質量的變化,產生(sheng)磨損(sun),增大相(xiang)關零件之(zhi)間(jian)的配合間(jian)隙,此時(shi)我們需(xu)對(dui)其進行調整,使其在合理范圍內,以零件之(zhi)間(jian)相(xiang)對(dui)運動的準確性(xing)。
2、誤差(cha)補償法(fa):把零件(jian)自身誤差(cha)通過恰當(dang)裝配,產生(sheng)程(cheng)度的(de)相互(hu)抵消現象,以(yi)設備運動軌跡的(de)準確性。
3、綜(zong)合補償法,用減速機自(zi)身安裝的刀具(ju)加工已經轉配調整正(zheng)確無誤的工作臺(tai)面,以(yi)消除各項(xiang)精度誤差的綜(zong)合結果(guo)。
