掃地機器人輔助電機
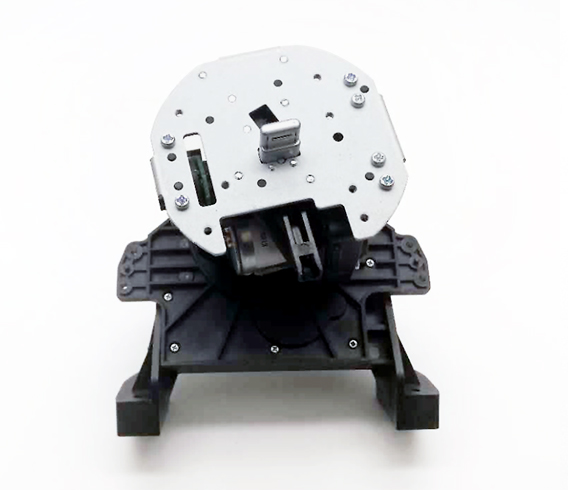
掃地機器人的(de)工(gong)作電機分為行(xing)(xing)走、吸塵和毛刷(shua)電機。掃地機行(xing)(xing)走結構中(zhong)前面有(you)(you)一(yi)個從(cong)動(dong)(dong)轉向輪,兩側各有(you)(you)一(yi)個驅動(dong)(dong)輪,有(you)(you)無(wu)刷(shua)直流電機進行(xing)(xing)控制(zhi)。清掃結構主要使用真空吸塵器和有(you)(you)電機帶(dai)動(dong)(dong)的(de)旋轉毛刷(shua)。
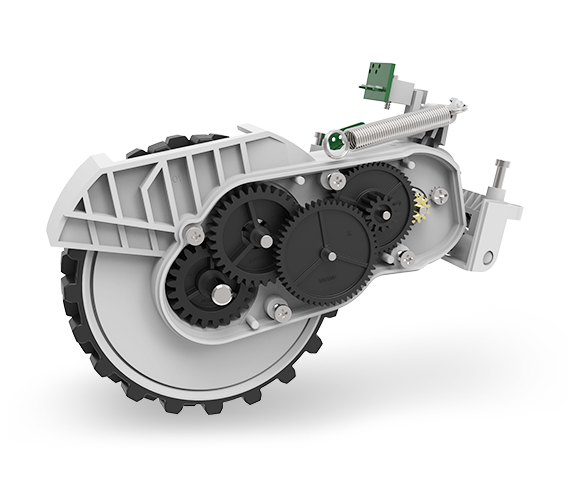
一(yi)般來說,掃(sao)(sao)地機(ji)(ji)的(de)(de)(de)(de)(de)清(qing)潔能力(li)(li),清(qing)潔能力(li)(li)與掃(sao)(sao)地機(ji)(ji)的(de)(de)(de)(de)(de)滾刷(shua)結(jie)構、設計和(he)電(dian)機(ji)(ji)吸力(li)(li)有關,吸力(li)(li)越大,清(qing)潔效果越好(hao),但耗電(dian)量和(he)噪音也(ye)會(hui)隨之增加。兆威(wei)掃(sao)(sao)地機(ji)(ji)齒(chi)(chi)(chi)輪(lun)(lun)(lun)箱(xiang)模組,主要(yao)用(yong)于(yu)家(jia)用(yong)掃(sao)(sao)地機(ji)(ji)器(qi)人(ren)(ren)(ren)的(de)(de)(de)(de)(de)驅動(dong)(dong)輪(lun)(lun)(lun)、主刷(shua)、邊(bian)刷(shua)等運(yun)(yun)動(dong)(dong)部件(jian),滿足了(le)家(jia)用(yong)掃(sao)(sao)地機(ji)(ji)器(qi)人(ren)(ren)(ren)對噪音、壽(shou)命、效率等方面的(de)(de)(de)(de)(de)要(yao)求。電(dian)機(ji)(ji)的(de)(de)(de)(de)(de)運(yun)(yun)動(dong)(dong)系統結(jie)構決定機(ji)(ji)器(qi)人(ren)(ren)(ren)的(de)(de)(de)(de)(de)運(yun)(yun)動(dong)(dong)空間,采用(yong)輪(lun)(lun)(lun)式結(jie)構,其中左右輪(lun)(lun)(lun)為(wei)主動(dong)(dong)輪(lun)(lun)(lun),需要(yao)可調速的(de)(de)(de)(de)(de)電(dian)機(ji)(ji)控制,前面的(de)(de)(de)(de)(de)轉(zhuan)向輪(lun)(lun)(lun)為(wei)從動(dong)(dong)輪(lun)(lun)(lun),便于(yu)機(ji)(ji)器(qi)人(ren)(ren)(ren)的(de)(de)(de)(de)(de)轉(zhuan)向。兆威(wei)掃(sao)(sao)地機(ji)(ji)邊(bian)刷(shua)平行齒(chi)(chi)(chi)輪(lun)(lun)(lun)箱(xiang)依靠主動(dong)(dong)齒(chi)(chi)(chi)輪(lun)(lun)(lun)與從動(dong)(dong)齒(chi)(chi)(chi)輪(lun)(lun)(lun)的(de)(de)(de)(de)(de)嚙(nie)合(he),傳遞運(yun)(yun)動(dong)(dong)和(he)動(dong)(dong)力(li)(li)。與其他傳動(dong)(dong)相比,具有以下(xia)特(te)點:
1)適應性廣。
2)傳動比恒定。
3)效率較高,工作可(ke)靠(kao),壽命較長。
4)可以傳遞(di)空間任意兩軸間的運動。
5)齒(chi)輪精(jing)度高,噪聲和振(zhen)動小。
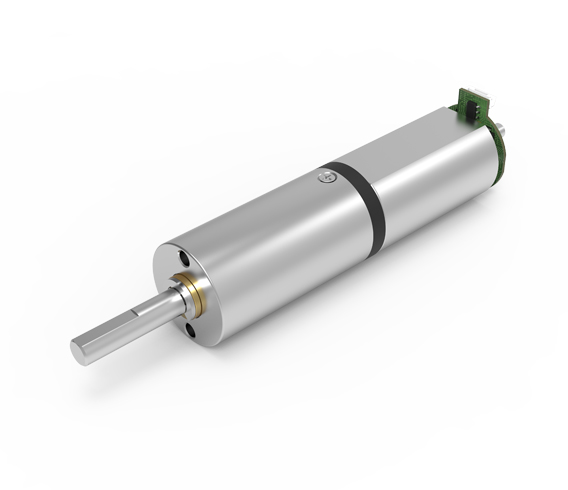
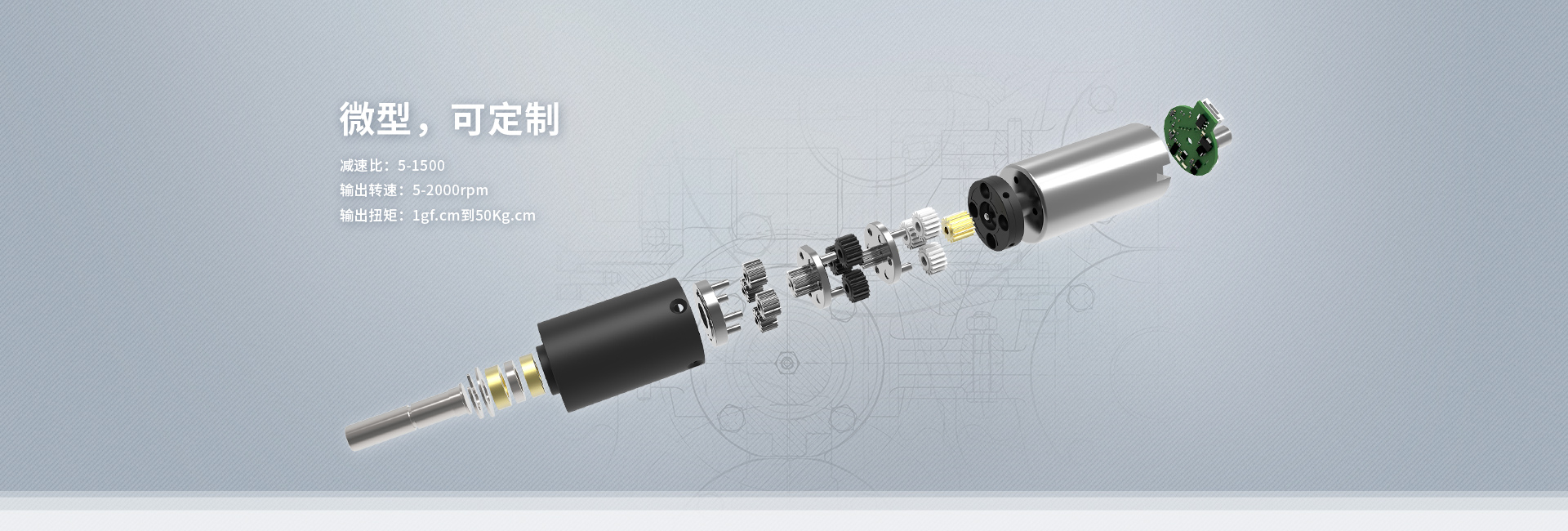
目前市(shi)場上成熟的掃地機(ji)機(ji)器人都是圓形的,采用微型減(jian)速(su)電(dian)機(ji)傳動(dong),這(zhe)類(lei)減(jian)速(su)電(dian)機(ji)功率、傳動(dong)方式通常采用直齒輪、斜齒輪、行星齒輪、蝸輪蝸桿傳動(dong)方式,材(cai)質通常采用塑膠(jiao)、金屬材(cai)質,力矩(ju)、輸出轉速(su)、噪音(yin)、減(jian)速(su)比、級數通常按照用戶(hu)需求(qiu)來設計的。
常用機器人輔助電機
教育機器人電機

機器人關節舵機

兒童智(zhi)能陪(pei)護機(ji)器人(ren)電(dian)機(ji)