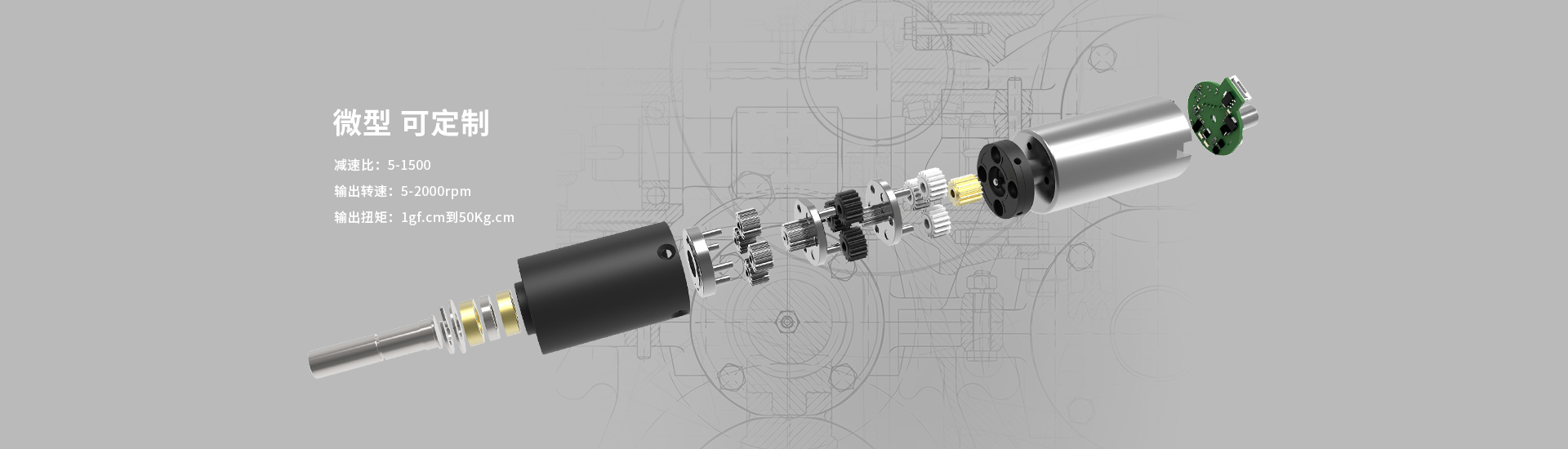
智(zhi)(zhi)能(neng)機(ji)(ji)(ji)器(qi)(qi)(qi)(qi)(qi)(qi)人(ren)具備(bei)形形色色的(de)(de)內部(bu)信(xin)息(xi)傳(chuan)感器(qi)(qi)(qi)(qi)(qi)(qi)和外(wai)部(bu)信(xin)息(xi)傳(chuan)感器(qi)(qi)(qi)(qi)(qi)(qi),如視覺(jue)、聽覺(jue)、觸(chu)覺(jue)、嗅覺(jue)。除具有(you)感受器(qi)(qi)(qi)(qi)(qi)(qi)外(wai),它還有(you)效應(ying)器(qi)(qi)(qi)(qi)(qi)(qi),作(zuo)為(wei)作(zuo)用(yong)(yong)于周圍環(huan)境的(de)(de)手(shou)段。這就(jiu)是(shi)筋肉,或(huo)稱自整步電(dian)動(dong)機(ji)(ji)(ji),它們使(shi)手(shou)、腳、長鼻子、觸(chu)角等動(dong)起來。由(you)(you)此也可知,智(zhi)(zhi)能(neng)機(ji)(ji)(ji)器(qi)(qi)(qi)(qi)(qi)(qi)人(ren)至少要(yao)具備(bei)三(san)個要(yao)素:感覺(jue)要(yao)素,反(fan)應(ying)要(yao)素和思考要(yao)素。微(wei)(wei)型智(zhi)(zhi)能(neng)機(ji)(ji)(ji)器(qi)(qi)(qi)(qi)(qi)(qi)人(ren)電(dian)機(ji)(ji)(ji)是(shi)一(yi)(yi)種運用(yong)(yong)在智(zhi)(zhi)能(neng)機(ji)(ji)(ji)器(qi)(qi)(qi)(qi)(qi)(qi)人(ren)驅(qu)(qu)(qu)動(dong)上的(de)(de)傳(chuan)動(dong)齒(chi)輪(lun)(lun)(lun)系統(tong)上,是(shi)一(yi)(yi)種小功(gong)率微(wei)(wei)型齒(chi)輪(lun)(lun)(lun)箱電(dian)機(ji)(ji)(ji),主(zhu)要(yao)傳(chuan)動(dong)結(jie)構(gou)由(you)(you)驅(qu)(qu)(qu)動(dong)電(dian)機(ji)(ji)(ji)(驅(qu)(qu)(qu)動(dong)馬達)、齒(chi)輪(lun)(lun)(lun)箱(減速(su)器(qi)(qi)(qi)(qi)(qi)(qi))集成(cheng)制造組裝而(er)成(cheng)的(de)(de)減速(su)設備(bei);驅(qu)(qu)(qu)動(dong)電(dian)機(ji)(ji)(ji)可以采(cai)(cai)用(yong)(yong)直流(liu)有(you)刷電(dian)機(ji)(ji)(ji)、直流(liu)無刷電(dian)機(ji)(ji)(ji)、步進電(dian)機(ji)(ji)(ji)、空心杯電(dian)機(ji)(ji)(ji)作(zuo)為(wei)驅(qu)(qu)(qu)動(dong)源(yuan),齒(chi)輪(lun)(lun)(lun)箱可采(cai)(cai)用(yong)(yong)行星齒(chi)輪(lun)(lun)(lun)箱、圓柱齒(chi)輪(lun)(lun)(lun)箱、蝸輪(lun)(lun)(lun)蝸桿齒(chi)輪(lun)(lun)(lun)箱作(zuo)為(wei)減速(su)器(qi)(qi)(qi)(qi)(qi)(qi);運用(yong)(yong)在不同類型的(de)(de)微(wei)(wei)型智(zhi)(zhi)能(neng)機(ji)(ji)(ji)器(qi)(qi)(qi)(qi)(qi)(qi)人(ren)的(de)(de)齒(chi)輪(lun)(lun)(lun)箱電(dian)機(ji)(ji)(ji)也不一(yi)(yi)樣,通常采(cai)(cai)用(yong)(yong)定(ding)制技術(shu)(shu)開發(fa)而(er)成(cheng),例如輸出(chu)功(gong)率,輸出(chu)轉速(su),減速(su)比(bi),輸出(chu)扭矩(ju),噪音噪音,傳(chuan)動(dong)精度,齒(chi)輪(lun)(lun)(lun)箱傳(chuan)動(dong)結(jie)構(gou)類型等技術(shu)(shu)參數是(shi)定(ding)制開發(fa)而(er)成(cheng);兆(zhao)威機(ji)(ji)(ji)電(dian)機(ji)(ji)(ji)電(dian)股份有(you)限公司提供一(yi)(yi)整套定(ding)制開發(fa)解決(jue)方案(an)服務,微(wei)(wei)型智(zhi)(zhi)能(neng)機(ji)(ji)(ji)器(qi)(qi)(qi)(qi)(qi)(qi)人(ren)電(dian)機(ji)(ji)(ji)齒(chi)輪(lun)(lun)(lun)箱定(ding)制技術(shu)(shu)參數范圍在,直徑(jing)規格在3.4mm-38mm之間,電(dian)壓在(zai)24V以下,輸(shu)出功率(lv)在50W以(yi)下,輸出轉速5rpm到1500rpm之間(jian),速比范圍2-2000之間(jian),輸出力(li)矩(ju)1gfNaN到50KgNaN之間微型傳動齒輪箱減速(su)系(xi)統。

項目名稱:智能機器人輪式行走齒輪箱解決方案
項(xiang)目背景:智(zhi)能機(ji)器人(ren)可(ke)以(yi)按(an)預先編排的(de)(de)程序或人(ren)工智(zhi)能技術(shu)制(zhi)(zhi)定(ding)的(de)(de)原則(ze)綱領行動,成熟智(zhi)能的(de)(de)產(chan)品可(ke)以(yi)取代人(ren)的(de)(de)工作,例(li)如生產(chan)業、建筑業,或是(shi)危險的(de)(de)工作。機(ji)器人(ren)按(an)運(yun)動方式(shi)分為輪式(shi)、腿式(shi)、履(lv)帶式(shi)、蛇形式(shi)和復(fu)合式(shi)等方式(shi)。其中輪式(shi)移(yi)動機(ji)器人(ren)在自(zi)主移(yi)動機(ji)器人(ren)領域占(zhan)有較(jiao)為重要的(de)(de)地(di)位(wei),具(ju)有運(yun)動速度快、控(kong)制(zhi)(zhi)簡(jian)單(dan)等特點,在自(zi)動碼垛生產(chan)線、無(wu)人(ren)駕(jia)駛(shi)車(che)輛 等領域應用廣泛。
技術難(nan)題:一是輪(lun)式移動(dong)機(ji)(ji)器人的(de)拐(guai)彎躲避(bi)障礙物能(neng)力差,二是輪(lun)式移動(dong)機(ji)(ji)器人的(de)爬坡(po)能(neng)力差,這也是限制輪(lun)式移動(dong)機(ji)(ji)器人應(ying)用的(de)原因。
解(jie)決方案:機(ji)器人輪式(shi)行走驅動部分采用(yong)直流電機(ji)和38mm行星齒輪(lun)箱組合,反對(dui)稱安裝(zhuang)方式。這種(zhong)方式可以(yi)在使輪(lun)對(dui)同軸,提(ti)供較大(da)動力(通常電機外(wai)形尺寸和功率成一(yi)定比例)的(de)情況下,減(jian)輕減(jian)速機輸(shu)出(chu)軸受力點(dian),大(da)大(da)縮短輪(lun)距,節約空間,以(yi)使機器人(ren)體(ti)積小型化。

銷售電話(hua):400-066-2287
郵(you)箱:sales@szzhaowei.net
傳真:0755-27323949
郵編:518000
地址:深圳市(shi)寶安區(qu)燕(yan)羅街道燕(yan)川社(she)區(qu)燕(yan)湖路(lu)62號(hao)



