











機器人頭部旋轉解決方案

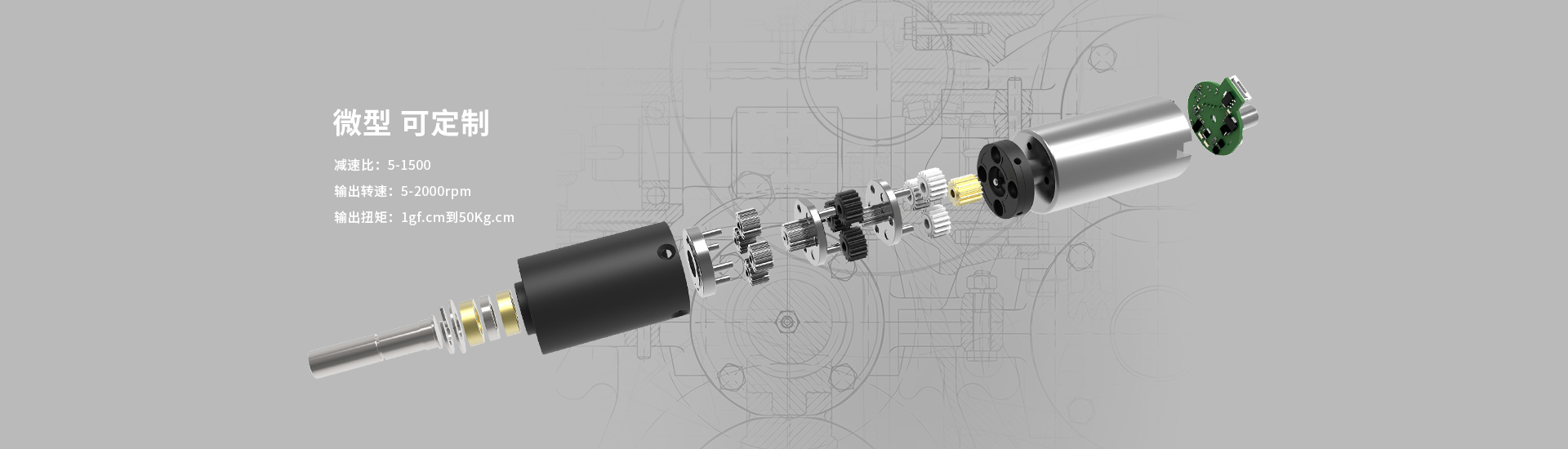
項目名稱:機器人頭(tou)部旋轉(zhuan)齒輪(lun)箱(xiang)
項目介紹:兆威機(ji)(ji)器人(ren)(ren)頭部(bu)智能旋轉(zhuan)(zhuan)舵機(ji)(ji)齒(chi)輪箱(xiang)模組,可實現機(ji)(ji)器人(ren)(ren)的頭部(bu)穩定模仿人(ren)(ren)體頭部(bu)的左右(you)、上下轉(zhuan)(zhuan)動,提高(gao)了機(ji)(ji)器人(ren)(ren)的 使用壽命。