步進電機使用什么減速器?
步進電機常常和減速器一起使用,這種組合體通常稱為步進減速電機,步進電(dian)機為什么要使用(yong)減(jian)(jian)速(su)器(qi)?步進電(dian)機使用(yong)什么減(jian)(jian)速(su)器(qi)?下面詳細介紹這兩(liang)方面的特點和步進電(dian)機減(jian)(jian)速(su)器(qi)類型(xing)。
步進電機為什么要使用減速器:
1.步進(jin)電機(ji)切換定子相電流的(de)(de)頻率,如改(gai)變步進(jin)電機(ji)驅動(dong)(dong)電路(lu)的(de)(de)輸入(ru)脈(mo)沖,使其(qi)變成低速(su)(su)(su)(su)運動(dong)(dong),低速(su)(su)(su)(su)步進(jin)電機(ji)在(zai)等待(dai)步進(jin)指令時,轉(zhuan)(zhuan)子處于停止(zhi)狀態,在(zai)低速(su)(su)(su)(su)步進(jin)時,速(su)(su)(su)(su)度(du)波動(dong)(dong)會(hui)很(hen)大(da),此時如改(gai)為高(gao)速(su)(su)(su)(su)運行,就能解決速(su)(su)(su)(su)度(du)波動(dong)(dong)問題,但(dan)轉(zhuan)(zhuan)矩(ju)又會(hui)不(bu)足,即低速(su)(su)(su)(su)會(hui)轉(zhuan)(zhuan)矩(ju)波動(dong)(dong),而(er)高(gao)速(su)(su)(su)(su)又會(hui)轉(zhuan)(zhuan)矩(ju)不(bu)足。
2.小型(50mm以下(xia))PM型步(bu)進電(dian)機的步(bu)距角為(wei)7.5°,此種電(dian)機會出現位置控制精度(du)變化的問(wen)題。
3.步(bu)進電機的(de)輸出軸采用(yong)直驅負載(zai)的(de)方式,當負載(zai)慣(guan)量(liang)大(da)時,會(hui)出現加速轉矩不足的(de)現象(xiang)。
4.希望低速大(da)轉矩制動(dong)的情況。
步進電機使用什么減速器:
1.步進(jin)電機用蝸(gua)輪蝸(gua)桿減速(su)器(qi):蝸(gua)輪蝸(gua)桿減速(su)器(qi)的(de)特點是體積比較大(da),結(jie)構不夠緊湊,一定條(tiao)件下(xia)可以自鎖,效率比較低(di),大(da)概在(zai)60%左右。因(yin)為效率比較低(di),很多場合滿足不了,一般(ban)不推薦和步進(jin)電機搭配使用。
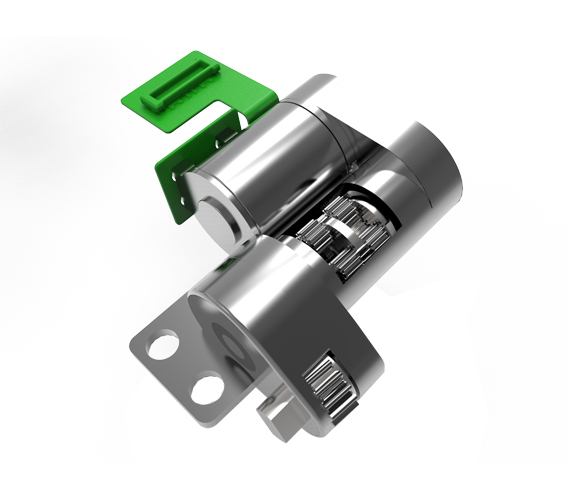
2.步進電機用行星減速器:行星減速器行星顧名思義就是圍繞恒星轉動,因此行星減速器就是如此,有三個行星輪圍繞一個太陽輪旋轉的減速器。行星減速機具有高(gao)強(qiang)度、體積小、噪音低(di)、價(jia)格(ge)低(di)、傳(chuan)動扭矩(ju)大,壽命高(gao)等(deng)特點,而且傳(chuan)動良好,大概在80%以上;
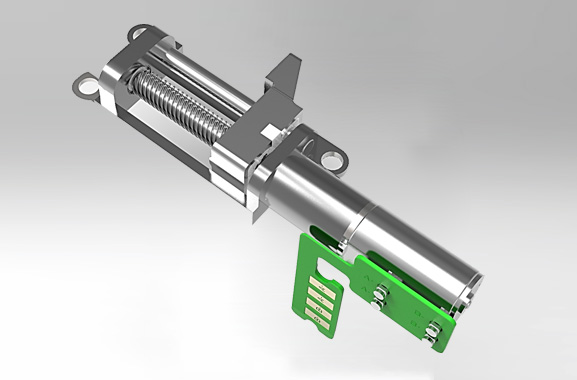
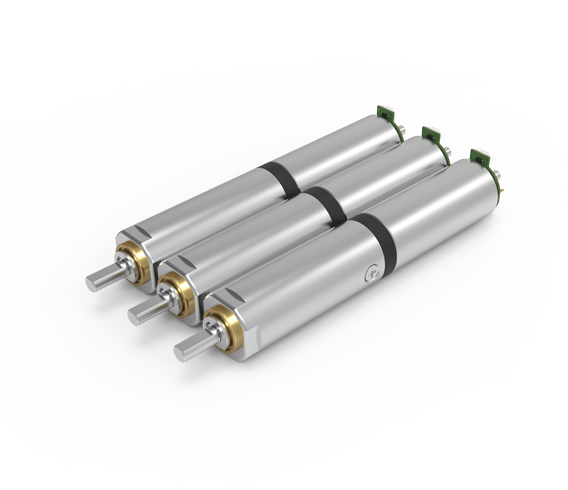
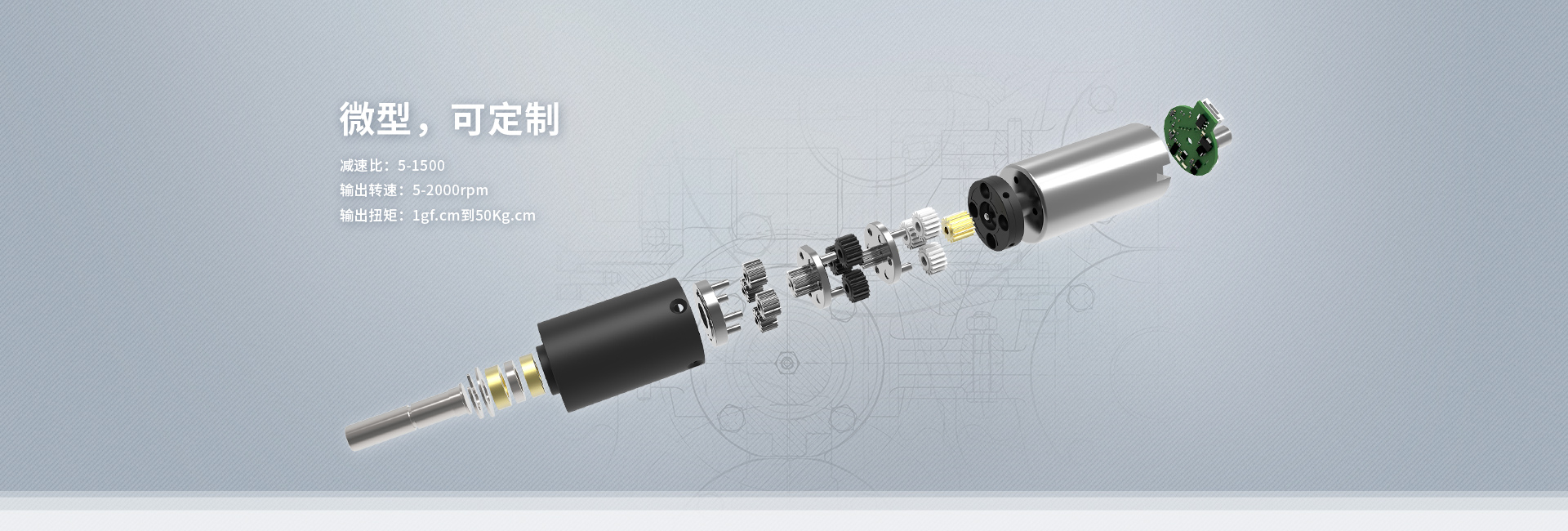
3.標(biao)(biao)準步進(jin)電(dian)機齒輪箱減(jian)(jian)速器(qi):微型標(biao)(biao)準步進(jin)電(dian)機齒輪箱減(jian)(jian)速器(qi)的直徑規格在3.4mm-38mm之間,減(jian)(jian)速比,空載輸(shu)出轉速,負載輸(shu)出轉速,驅動噪音,回程(cheng)間隙等技術參數可(ke)以按照(zhao)需求(qiu)定制而(er)成(cheng)。
4.非標準(zhun)定制步進減(jian)速器:按照實際應(ying)用(yong)需求定制的非標步進電機減(jian)速器產品,廣泛(fan)應(ying)用(yong)在智能家居、智能機器人、通訊設(she)備、3C電子、線(xian)性驅動、醫療設(she)備、工業(ye)裝備、虛擬現(xian)實行業(ye)中。