




混合驅動內聯系傳動鏈中的運動合成分析
混合聯動是英國利物(wu)浦科技(ji)大(da)學(xue)Jones和Tokuz于(yu)20世紀90年代初創建的(de)研究領域。根(gen)據傳(chuan)統機(ji)構(gou)(gou)和可控機(ji)構(gou)(gou)各自的(de)特點,他們提出了一(yi)種(zhong)(zhong)全新(xin)的(de)機(ji)械(xie)系統——混合傳(chuan)動機(ji)構(gou)(gou),這(zhe)種(zhong)(zhong)機(ji)構(gou)(gou)同時具有兩(liang)類機(ji)構(gou)(gou)的(de)特點,通過理論和實驗結果驗證了這(zhe)類機(ji)構(gou)(gou)的(de)特性,其結論是:全伺服傳(chuan)動機(ji)構(gou)(gou)的(de)柔性較大(da),幾乎能滿足各種(zhong)(zhong)運(yun)動規律要(yao)求(qiu)。
但既有的伺(si)服(fu)(fu)電機(ji)功率較(jiao)小(xiao),全伺(si)服(fu)(fu)電動(dong)機(ji)構很難適應(ying)較(jiao)大(da)功率需求的情(qing)況。在實現升(sheng)—降輸出運(yun)動(dong)時,混合傳動(dong)機(ji)構對(dui)(dui)伺(si)服(fu)(fu)電機(ji)的功率需求比全伺(si)服(fu)(fu)傳動(dong)機(ji)構對(dui)(dui)伺(si)服(fu)(fu)電機(ji)需求要小(xiao)得多。
以上內容摘自《機(ji)械傳動》 第三十九卷(juan) 第4期(qi)
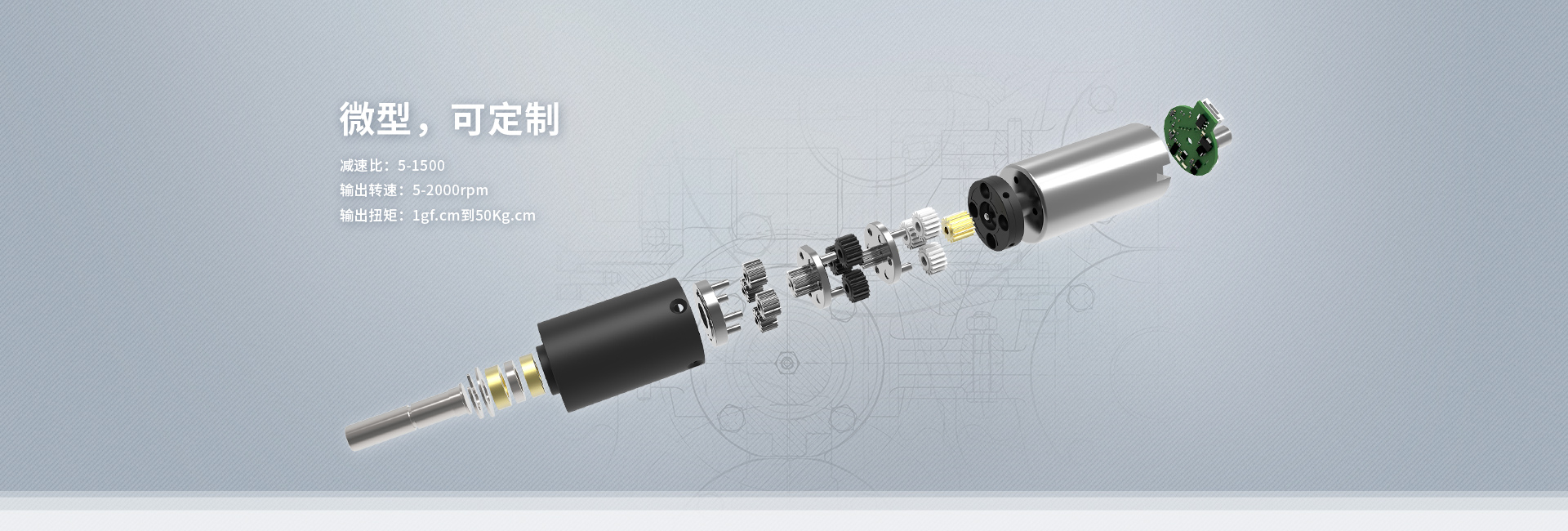
兆威機電通過在齒輪及齒輪箱領域多年的設計、開發、生產,通過行業的對比及大量的實驗測試數據設計開發出微型減速電機,齒(chi)輪箱(xiang)(xiang)電(dian)(dian)(dian)(dian)機,牙箱(xiang)(xiang)電(dian)(dian)(dian)(dian)機,齒(chi)輪箱(xiang)(xiang)減速電(dian)(dian)(dian)(dian)機,行星(xing)齒(chi)輪箱(xiang)(xiang),減速牙箱(xiang)(xiang),行星(xing)減速器,減速齒(chi)輪箱(xiang)(xiang)電(dian)(dian)(dian)(dian)機,行星(xing)減速電(dian)(dian)(dian)(dian)機,減速齒(chi)輪箱(xiang)(xiang)等。
